Essence
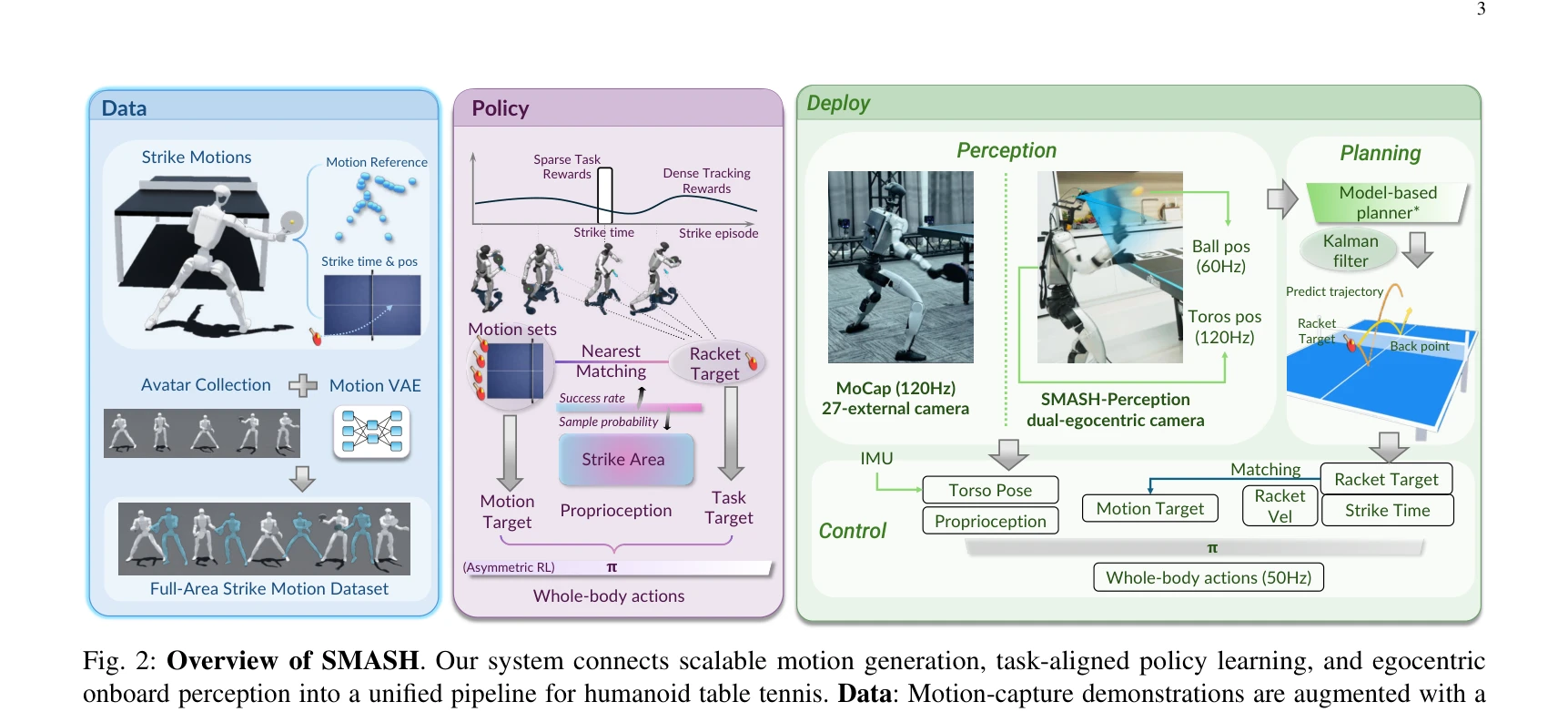
Fig. 2: Overview of SMASH. Our system connects scalable motion generation, task-aligned policy learning, and egocentric
휴머노이드 로봇의 탁구 게임을 위해 확장 가능한 전신 동작 학습과 자체 에고센트릭 비전을 통합한 SMASH 시스템을 제시하며, 외부 카메라나 모션 캡처 없이 실외에서 연속적인 탁구 스트라이킹을 처음으로 달성했다.
저자: | 날짜: 2026-04-01 | URL: https://arxiv.org/abs/2604.01158 📄 PDF
Fig. 2: Overview of SMASH. Our system connects scalable motion generation, task-aligned policy learning, and egocentric
휴머노이드 로봇의 탁구 게임을 위해 확장 가능한 전신 동작 학습과 자체 에고센트릭 비전을 통합한 SMASH 시스템을 제시하며, 외부 카메라나 모션 캡처 없이 실외에서 연속적인 탁구 스트라이킹을 처음으로 달성했다.
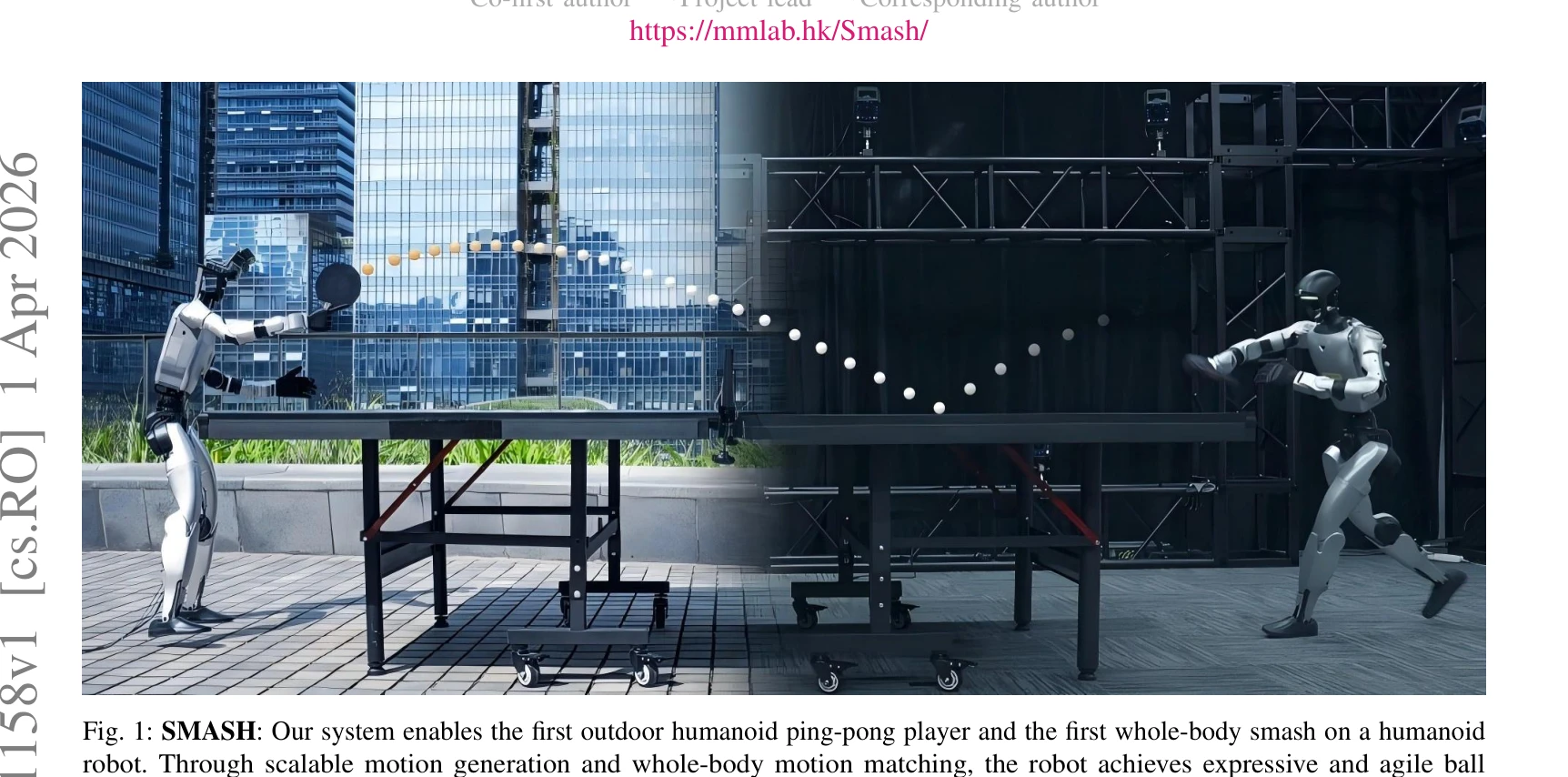
Fig. 1: SMASH: Our system enables the first outdoor humanoid ping-pong player and the first whole-body smash on a humano
Fig. 2: Overview of SMASH. Our system connects scalable motion generation, task-aligned policy learning, and egocentric
총평: 이 논문은 휴머노이드 탁구에서 에고센트릭 온보드 지각과 전신 협응 제어를 통합한 최초의 자율 시스템을 구현함으로써 로봇 동적 상호작용 연구에 중요한 기여를 하였다. Motion VAE 기반 동작 확장과 task-aligned motion matching이라는 확장 가능한 방법론은 다른 동적 로봇 과제에도 적용 가능한 잠재력이 있다.