Essence
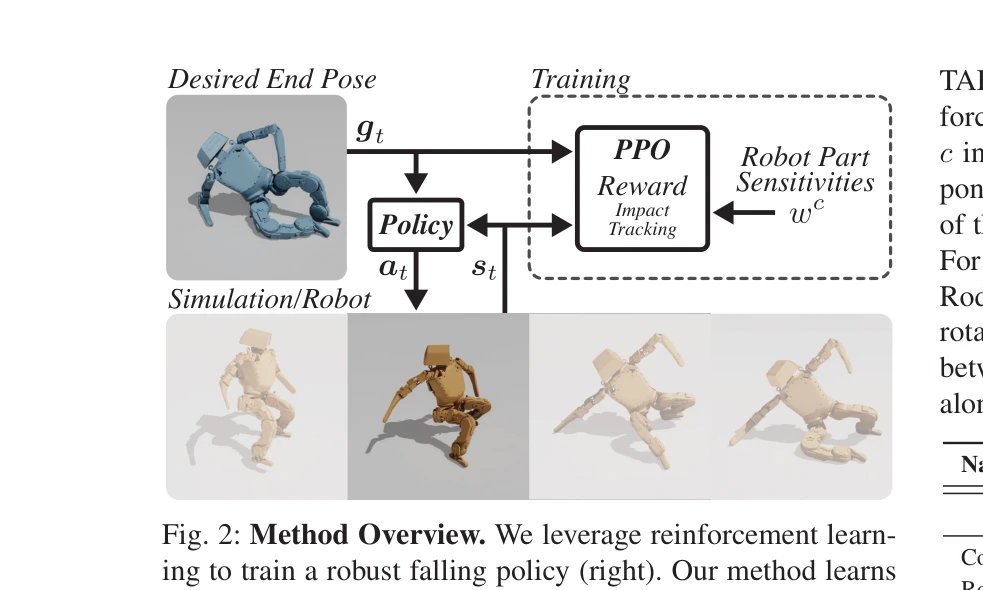
Fig. 2: Method Overview. We leverage reinforcement learn-
이 논문은 양족 로봇의 낙하 현상 자체에 초점을 맞춰, 충격을 최소화하면서 사용자가 지정한 목표 자세에 도달하도록 하는 강화학습 기반 낙하 정책을 제안한다.
저자: Pascal Strauch, David Müller, Sammy Christen, Agon Serifi, Ruben Grandia, Espen Knoop, Moritz Bächer | 날짜: 2025-11-13 | DOI: 10.48550/arXiv.2511.10635 📄 PDF
Fig. 2: Method Overview. We leverage reinforcement learn-
이 논문은 양족 로봇의 낙하 현상 자체에 초점을 맞춰, 충격을 최소화하면서 사용자가 지정한 목표 자세에 도달하도록 하는 강화학습 기반 낙하 정책을 제안한다.
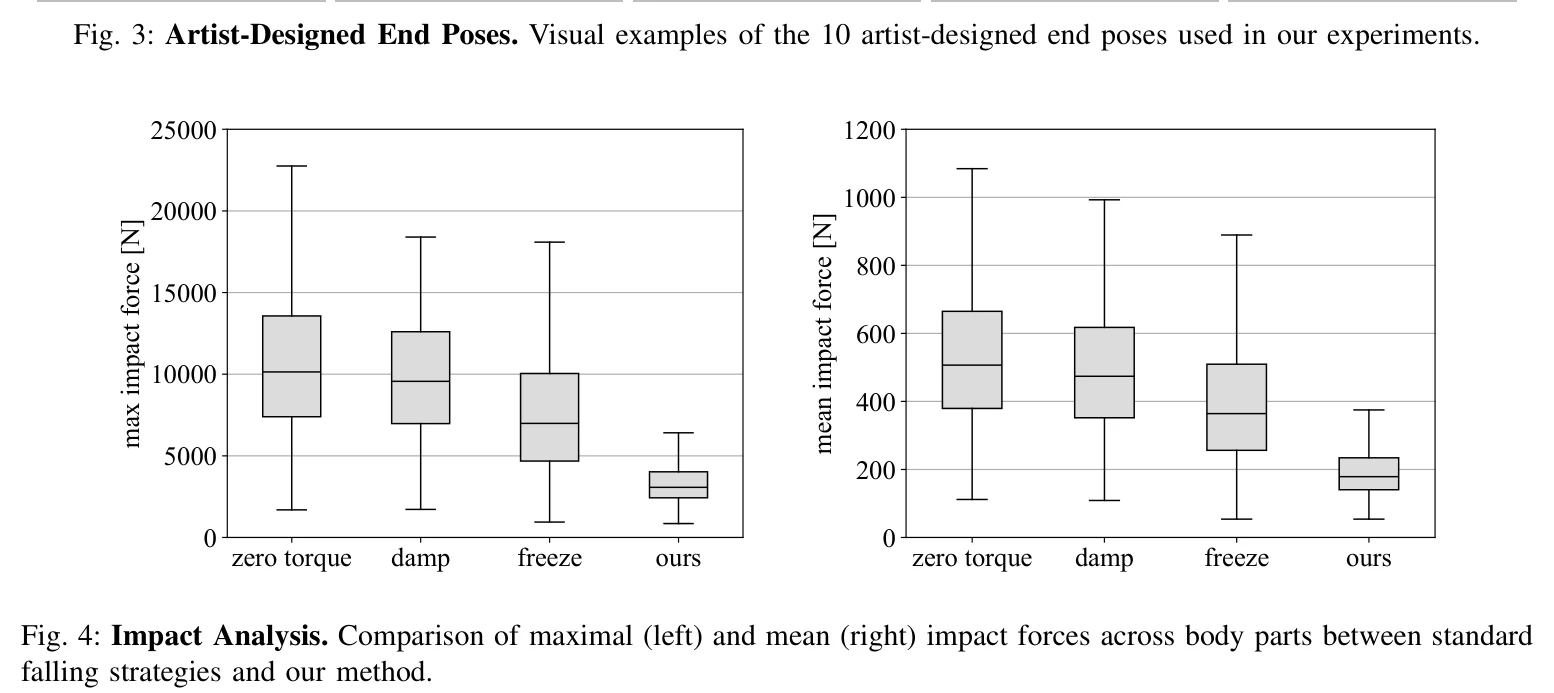
Fig. 4: Impact Analysis. Comparison of maximal (left) and mean (right) impact forces across body parts between standard
Fig. 2: Method Overview. We leverage reinforcement learn-
총평: 이 논문은 로봇 낙하를 예방이 아닌 제어 대상으로 재정의하는 독창적 관점을 제시하며, RL 기반 다목적 보상 함수와 샘플링 전략으로 범용적 해결책을 제공한다. 실제 양족 로봇에서 부드럽고 스타일화된 낙하를 시연한 점에서 높은 의의가 있으나, 정량적 평가 확대와 다양한 로봇 플랫폼 검증이 필요하다.