Essence
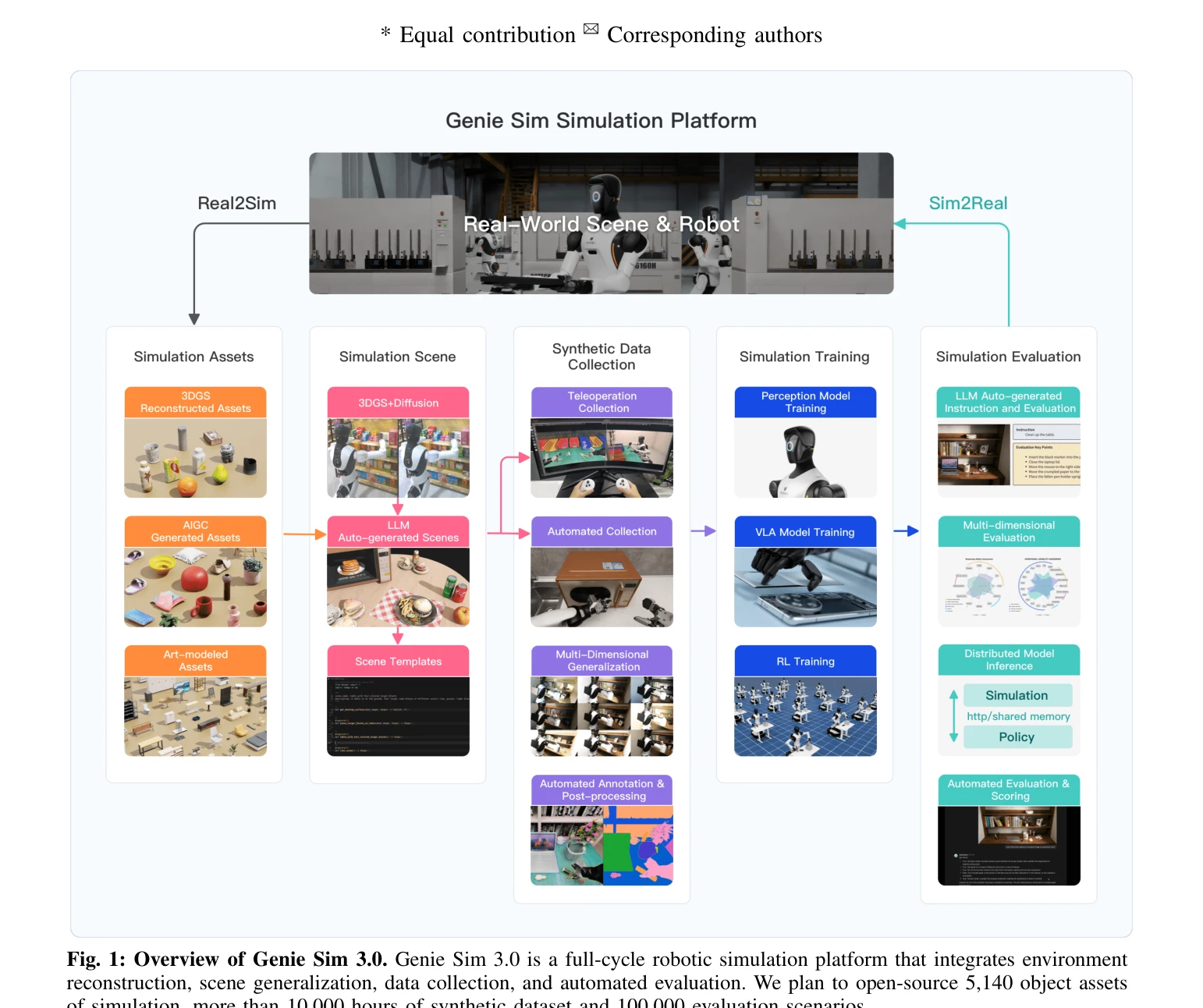
Fig. 1: Overview of Genie Sim 3.0. Genie Sim 3.0 is a full-cycle robotic simulation platform that integrates environment
Genie Sim 3.0은 LLM 기반 장면 생성, VLM 기반 자동 평가, 10,000시간 이상의 합성 데이터를 제공하는 휴머노이드 로봇 통합 시뮬레이션 플랫폼이다.
저자: Chenghao Yin, Da Huang, Di Yang, Jichao Wang, Nanshu Zhao, Chen Xu, Wenjun Sun, Linjie Hou, Zhijun Li, Junhui Wu, Zhaobo Liu, Zhen Xiao, Sheng Zhang, Lei Bao, Rui Feng, Zhenquan Pang, Jiayu Li, Qian Wang, Maoqing Yao | 날짜: 2026-01-05 | URL: https://arxiv.org/abs/2601.02078 📄 PDF
Fig. 1: Overview of Genie Sim 3.0. Genie Sim 3.0 is a full-cycle robotic simulation platform that integrates environment
Genie Sim 3.0은 LLM 기반 장면 생성, VLM 기반 자동 평가, 10,000시간 이상의 합성 데이터를 제공하는 휴머노이드 로봇 통합 시뮬레이션 플랫폼이다.
총평: Genie Sim 3.0은 LLM/VLM과 로봇 시뮬레이션을 통합한 혁신적 플랫폼으로, 자동화된 장면 생성, 대규모 합성 데이터, 다차원 평가 벤치마크를 통해 로봇 학습 개발 사이클을 크게 가속화할 수 있는 높은 기여도의 연구이다.