저자: Yejin Kim, Wilbert Pumacay, Omar Rayyan, Max Argus, Winson Han, Eli VanderBilt, Jordi Salvador, Abhay Deshpande, Rose Hendrix, Snehal Jauhri, Shuo Liu, Nur Muhammad Mahi Shafiullah, Maya Guru, Ainaz Eftekhar, Karen Farley, Donovan Clay, Jiafei Duan, Arjun Guru, Piper Wolters, Alvaro Herrasti, Ying-Chun Lee, Georgia Chalvatzaki, Yuchen Cui, Ali Farhadi, Dieter Fox, Ranjay Krishna | 날짜: 2026-02-11 | URL: https://arxiv.org/abs/2602.11337 📄 PDF
Essence
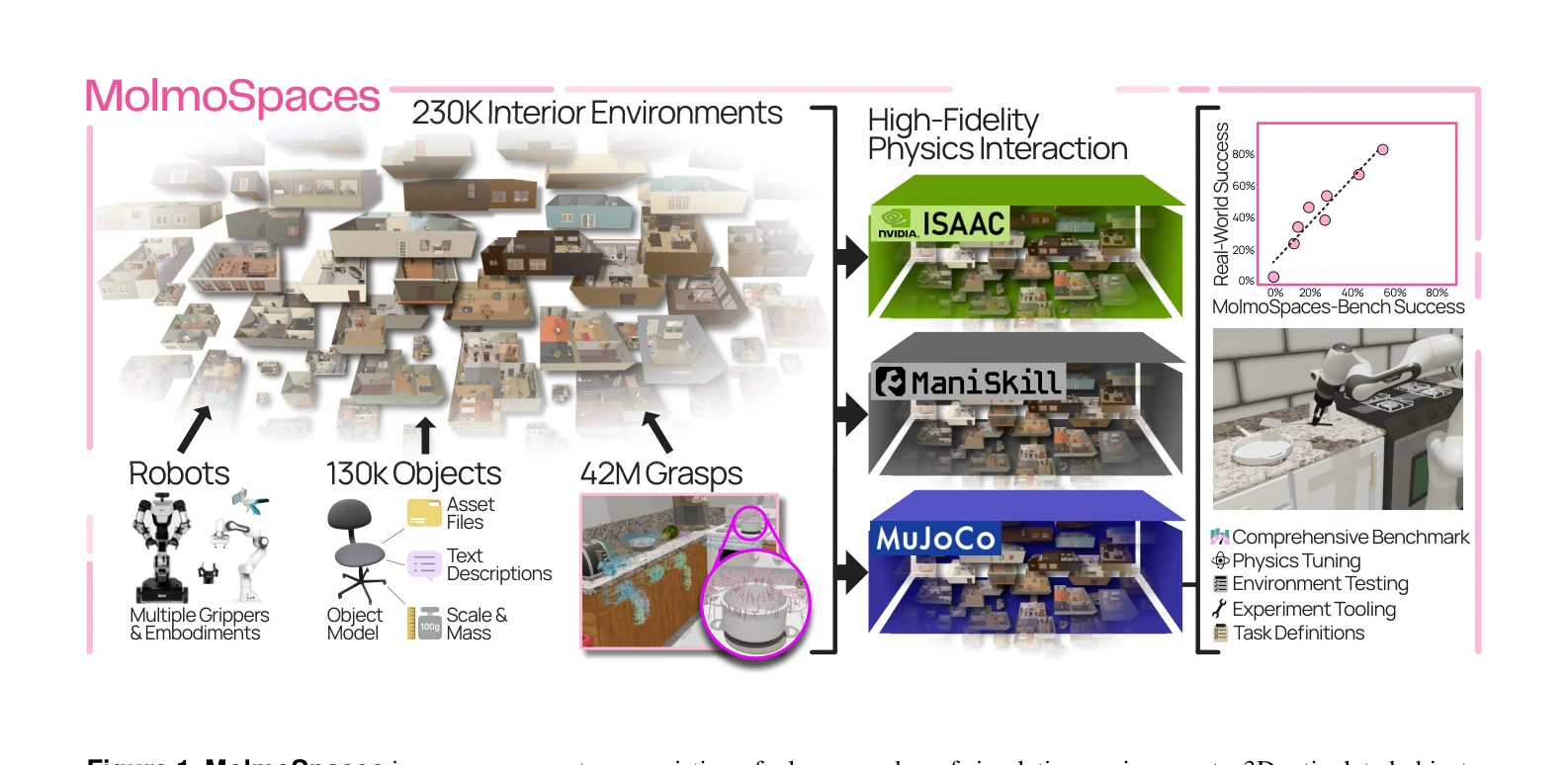
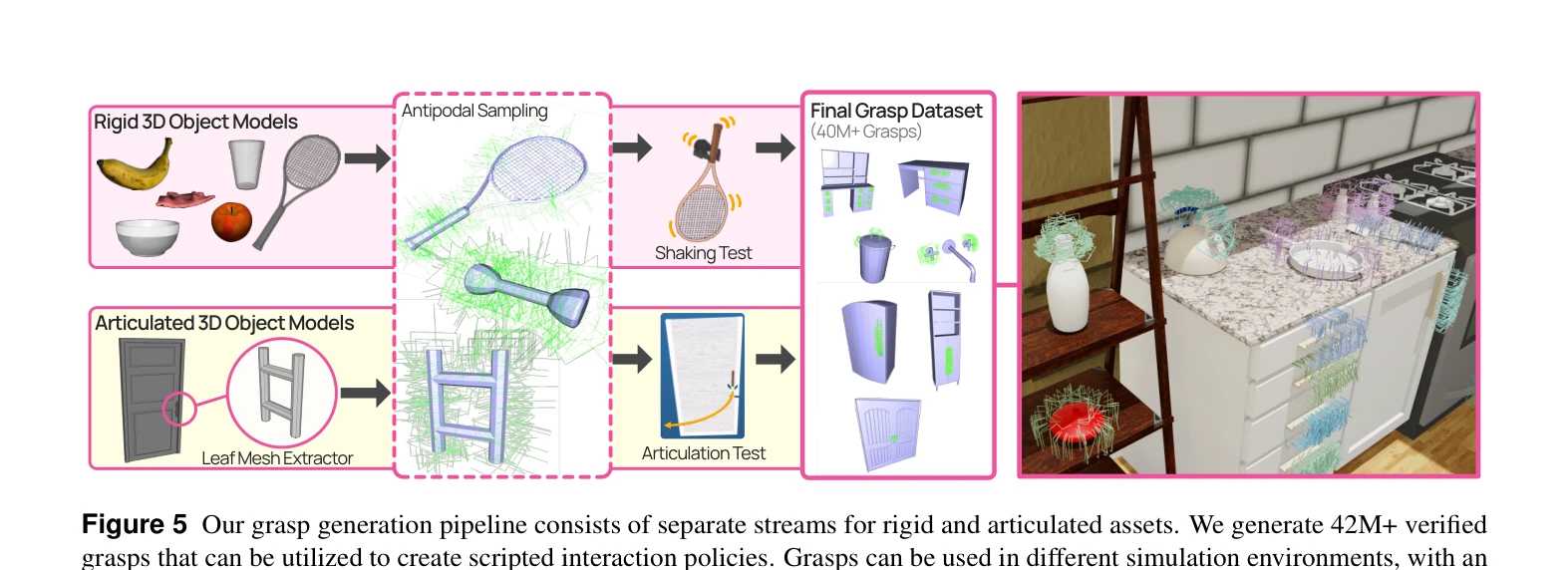
Figure 1 MolmoSpaces is an open ecosystem consisting of a large number of simulation environments, 3D articulated object
로봇 네비게이션과 매니퓰레이션을 위한 230k개 이상의 다양한 실내 환경, 130k개의 주석이 달린 객체 자산, 42M개의 안정적인 그래스프를 포함하는 대규모 오픈 에코시스템 MolmoSpaces를 제시하고, 이를 통해 로봇 정책의 일반화 능력을 평가할 수 있는 벤치마크를 구축했다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: MolmoSpaces는 로봇 학습의 평가 기준이 되어 왔던 장면과 객체의 규모 제약을 크게 확장하며, simulator-agnostic 설계와 강한 시뮬-투-리얼 상관관계 검증으로 실무적 신뢰성을 확보한 중요한 오픈 인프라이다. 다만 task 복잡도와 시각적 현실성에서 아직 개선의 여지가 있다.