Essence
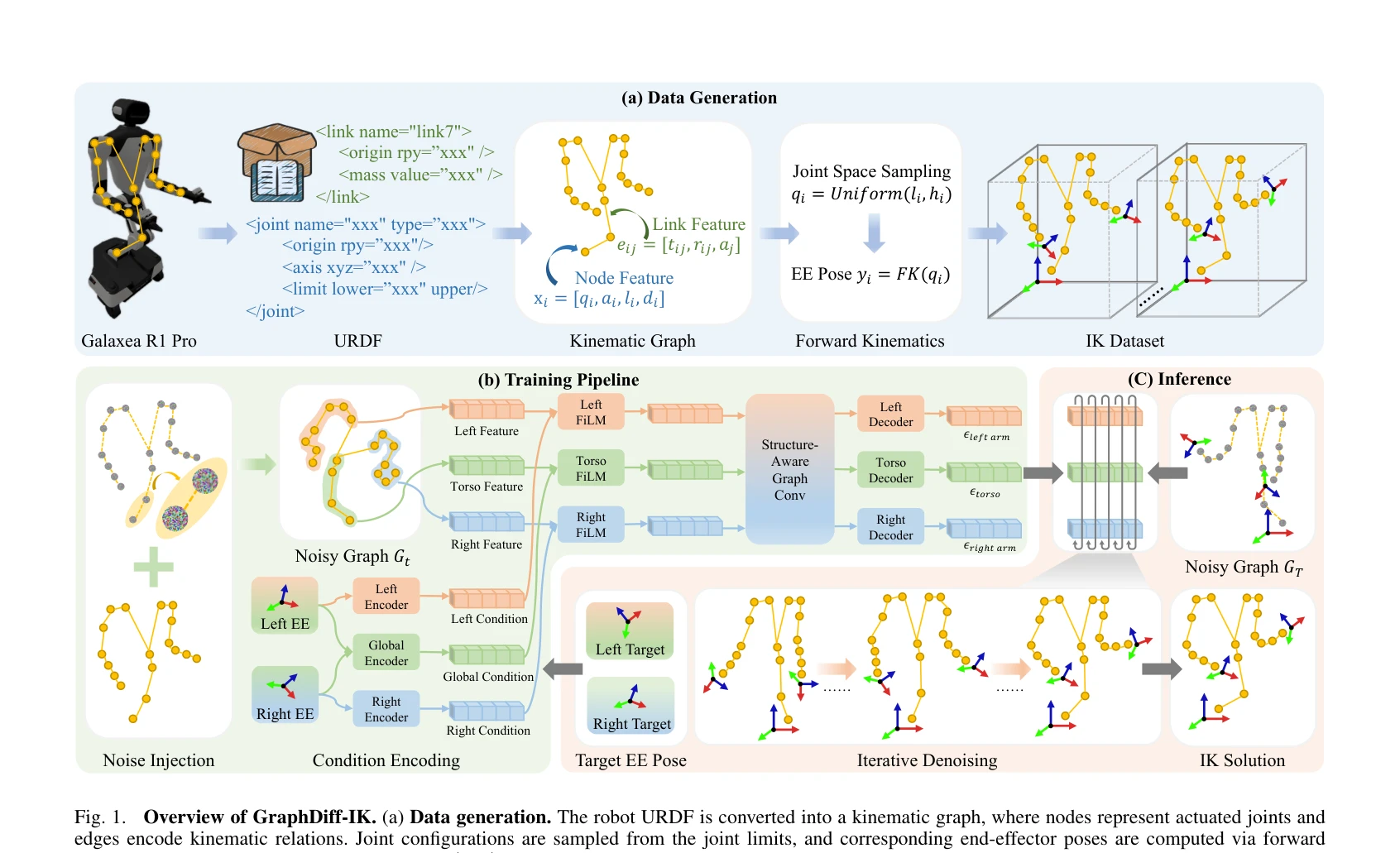
Fig. 1.
이 논문은 역기구학(inverse kinematics) 문제를 구조-인식형 그래프 확산 프레임워크인 GraphDiff-IK로 해결한다. 로봇의 URDF로부터 구성한 kinematic graph를 기반으로 조건부 그래프 diffusion process를 통해 직접 joint configuration을 생성하며, 단일 팔 로봇부터 dual-arm, 토소를 가진 전신 로봇까지 통일된 방식으로 지원한다.
저자: Helong Huang, Kai Tan, Feng Wen, Guowei Huang, Xingyue Quan | 날짜: 2026 | DOI: 10.48550/ARXIV.2606.00086 📄 PDF
Fig. 1.
이 논문은 역기구학(inverse kinematics) 문제를 구조-인식형 그래프 확산 프레임워크인 GraphDiff-IK로 해결한다. 로봇의 URDF로부터 구성한 kinematic graph를 기반으로 조건부 그래프 diffusion process를 통해 직접 joint configuration을 생성하며, 단일 팔 로봇부터 dual-arm, 토소를 가진 전신 로봇까지 통일된 방식으로 지원한다.
Fig. 1.
단일 팔 로봇 지원: 기본적인 kinematic chain에 효과적으로 작동. Dual-arm 시스템 지원: 좌우 팔 간 상호작용을 구조화된 방식으로 모델링. 토소/허리 관절이 있는 전신 로봇 지원: Torso-aware conditioning으로 다중 kinematic branch 간 coupling 포착. 다중 해 생성 능력: Diffusion model의 확률적 특성으로 redundant system에서 여러 feasible solution 생성. 높은 정확도 및 안정성: End-effector position과 orientation에서 기존 방법 대비 우수한 성능. Cross-morphology 일반화: 다양한 로봇 플랫폼에서 일관된 성능.
Fig. 1.
• URDF로부터 kinematic graph 자동 구성으로 로봇 구조 정보 인코딩. • Conditional graph diffusion으로 구조적 제약을 유지하면서 generation. • Structure-aware graph convolution으로 joint 간 kinematic dependency 명시적 모델링. • Hierarchical stage-wise message passing으로 multi-component 간 의존성 포착. • FiLM conditioning으로 branch-specific 생성 가이드. • Forward kinematics feedback과 task-space loss로 기하학적 타당성 강화. • 테스트 시에 optimize-free inference로 속도 개선.
• 로봇 IK를 kinematic graph 표현 기반의 graph diffusion 문제로 재정의한 새로운 관점. • URDF 구조를 자동으로 kinematic graph로 변환하여 구조 인식형 학습을 가능하게 함. • Torso-aware conditioning 메커니즘으로 multi-branch robot의 coupling을 새롭게 모델링. • End-effector constraint를 diffusion 조건부로 직접 통합하는 설계. • Structure-aware message passing으로 joint 간 의존성을 더 명시적으로 인코딩.
• 계산 비용: Iterative reverse diffusion process로 inference 시간이 최적화 기반 방법보다 클 가능성. • 데이터 의존성: Diverse한 end-effector pose 분포를 충분히 포함하는 학습 데이터 필요. • URDF 정확성 의존: URDF 표현이 정확하지 않으면 kinematic graph 표현에 영향. 후속 연구: Joint limit 외 제약 (예: self-collision avoidance)의 통합, Real-time inference 최적화, Meta-learning을 통한 더 빠른 새로운 로봇 적응.
총평: GraphDiff-IK는 구조-인식형 graph diffusion을 IK에 적용하여 다양한 로봇 형태의 통일된 처리, 다중 해 생성, 높은 정확도를 동시에 달성한 혁신적 접근법이다. 실제 로봇 플랫폼에서의 광범위한 검증과 우수한 성능으로, 현대 고도-자유도 로봇 제어에 실질적 기여가 기대된다.