Essence
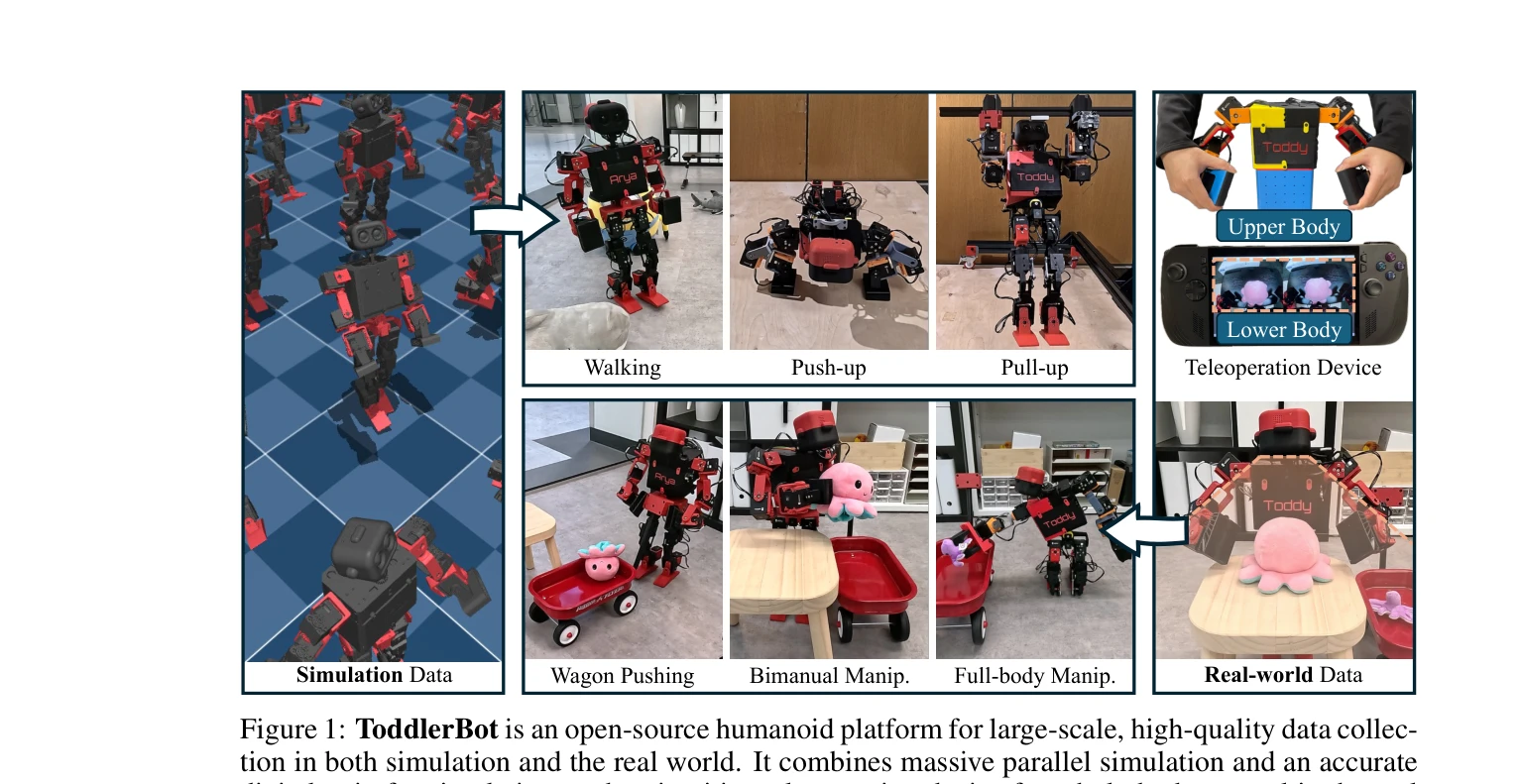
Figure 1: ToddlerBot is an open-source humanoid platform for large-scale, high-quality data collec-
ToddlerBot은 머신러닝 기반 로봇 정책 학습을 위해 설계된 저비용, 오픈소스 미니어처 인형로봇으로, 시뮬레이션과 실제 환경 모두에서 고품질 데이터 수집을 가능하게 하며 zero-shot sim-to-real 정책 전이를 지원한다.
저자: Haochen Shi, Weizhuo Wang, Shuran Song, C. Karen Liu | 날짜: 2025-02-02 | URL: https://arxiv.org/abs/2502.00893 📄 PDF
Figure 1: ToddlerBot is an open-source humanoid platform for large-scale, high-quality data collec-
ToddlerBot은 머신러닝 기반 로봇 정책 학습을 위해 설계된 저비용, 오픈소스 미니어처 인형로봇으로, 시뮬레이션과 실제 환경 모두에서 고품질 데이터 수집을 가능하게 하며 zero-shot sim-to-real 정책 전이를 지원한다.
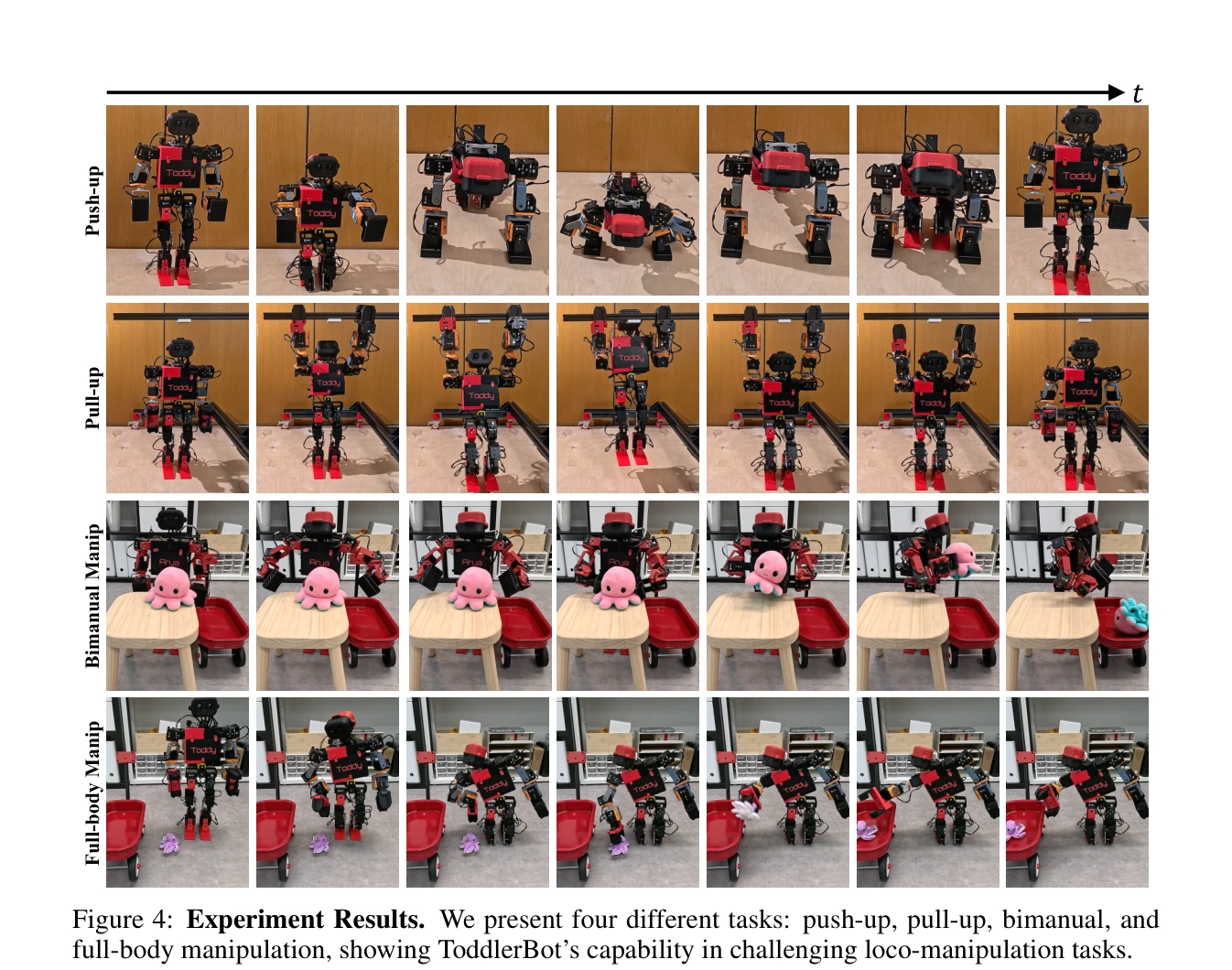
Figure 4: Experiment Results. We present four different tasks: push-up, pull-up, bimanual, and
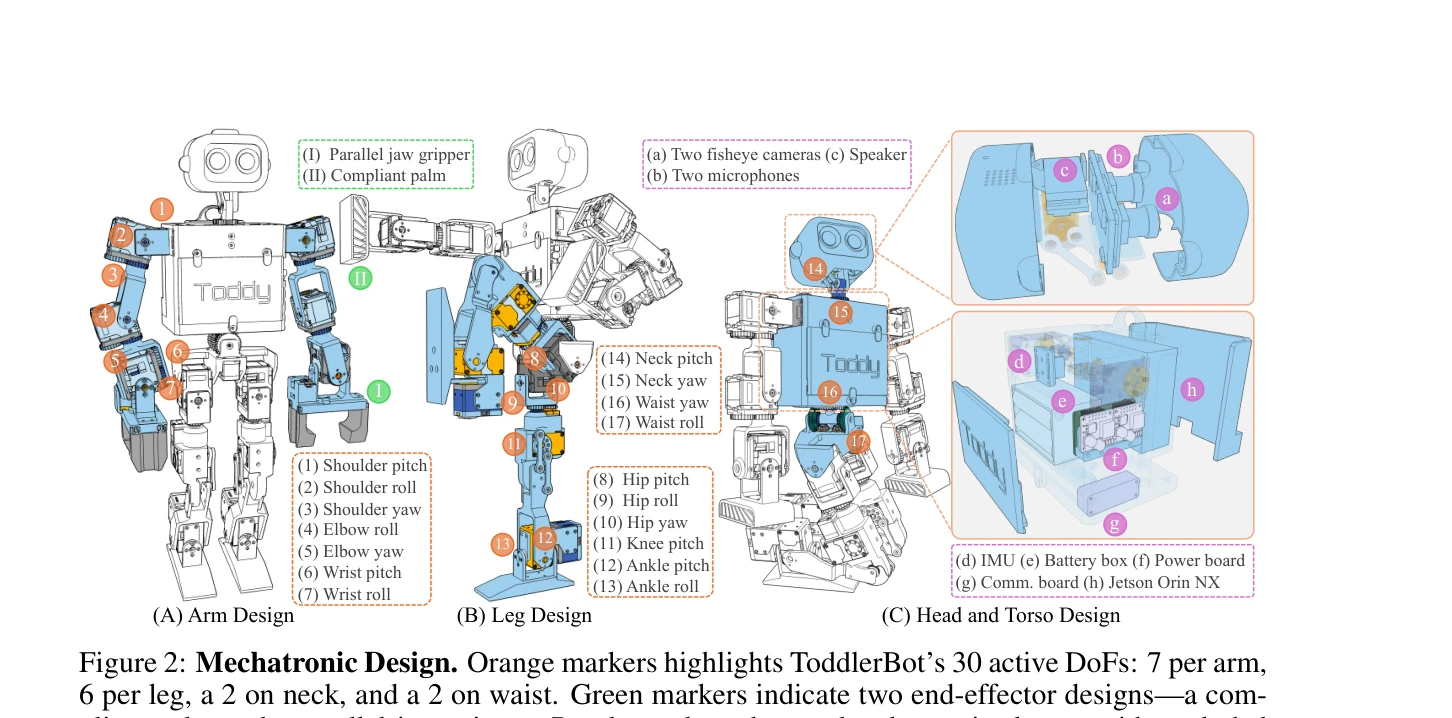
Figure 2: Mechatronic Design. Orange markers highlights ToddlerBot’s 30 active DoFs: 7 per arm,
총평: ToddlerBot은 ML-compatible 설계, 높은 자유도, 완벽한 재현성, 그리고 저비용이라는 독특한 조합으로 로봇공학 연구를 민주화하는 중요한 플랫폼이며, 시뮬레이션-실제 데이터 수집과 정책 학습을 위한 실질적인 도구를 제공한다.