저자: Fangyuan Wang, Ziyuan Wang, Guorui Pei, Mengshi Zhang, Canxi Liang, Jun Hu, Zhongxuan Li, Jinsong Wu, Ning Han, Zeqing Zhang, Jiaming Qi, Hongmin Wu, Shiyao Zhang, Pai Zheng, Jia Pan, David Navarro-Alarcon, Sichao Liu, Peng Zhou | 날짜: 2026 | DOI: 10.48550/ARXIV.2606.00113 📄 PDF
Essence
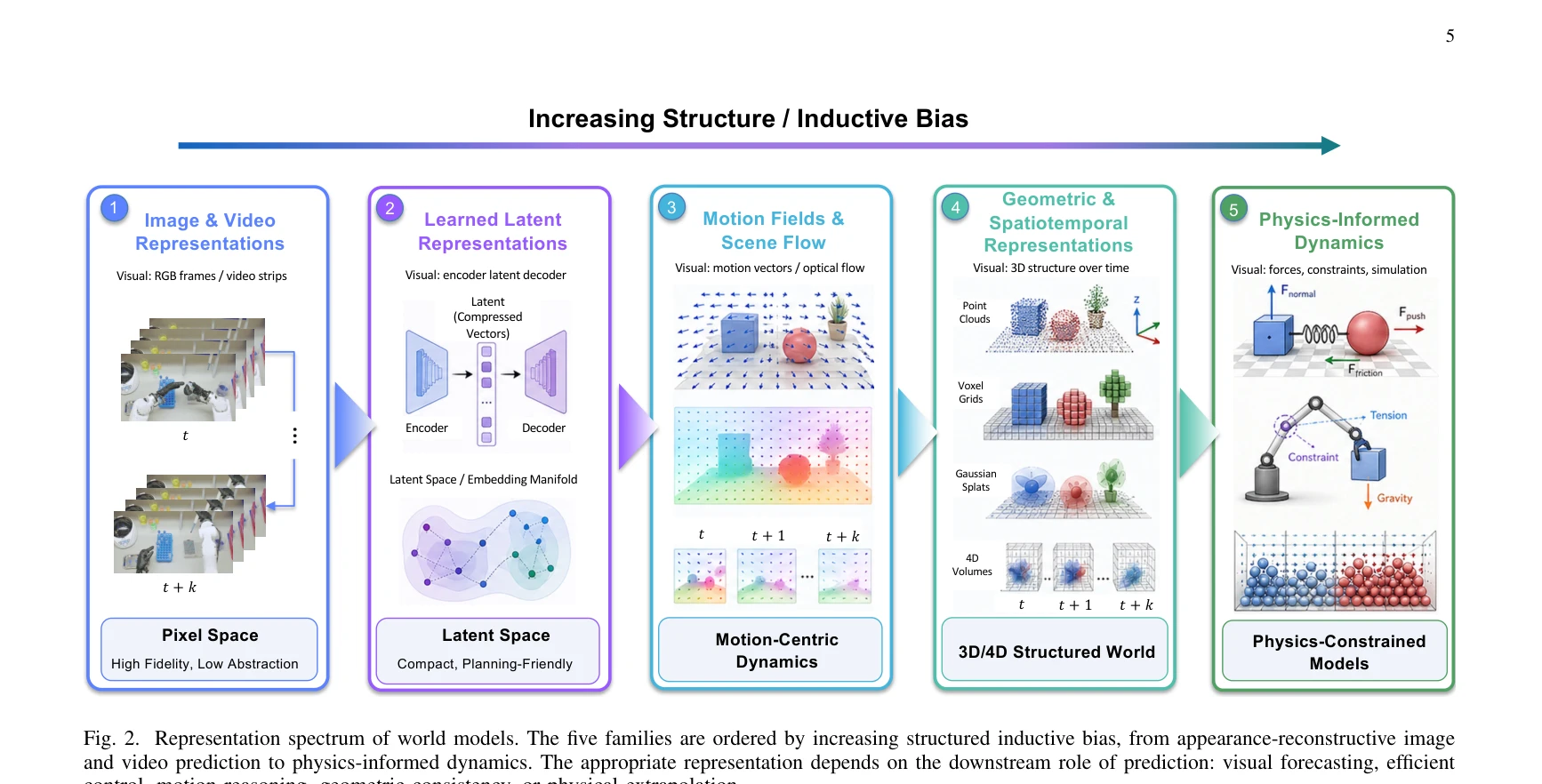
Fig. 2. Representation spectrum of world models. The five families are ordered by increasing structured inductive bias,
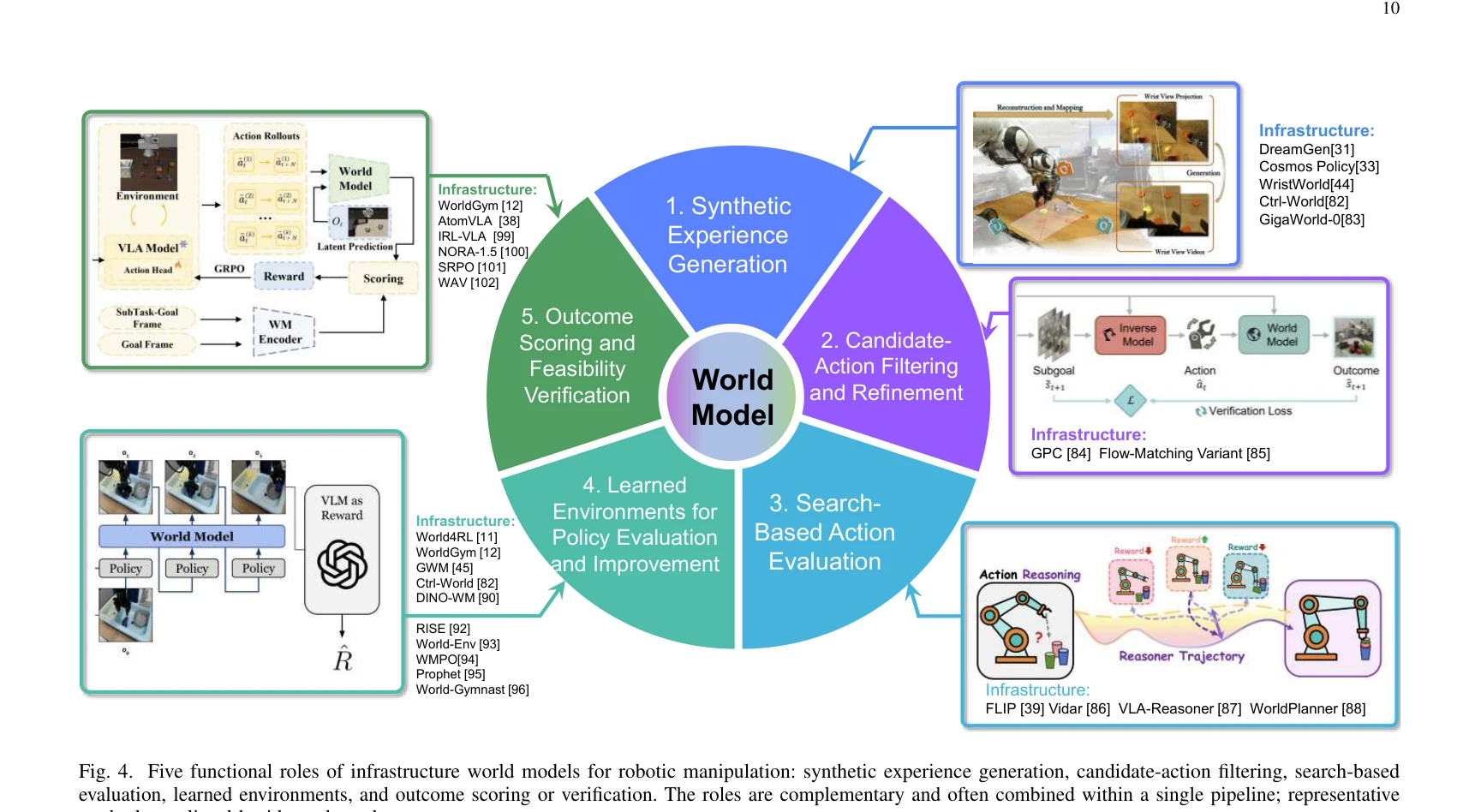
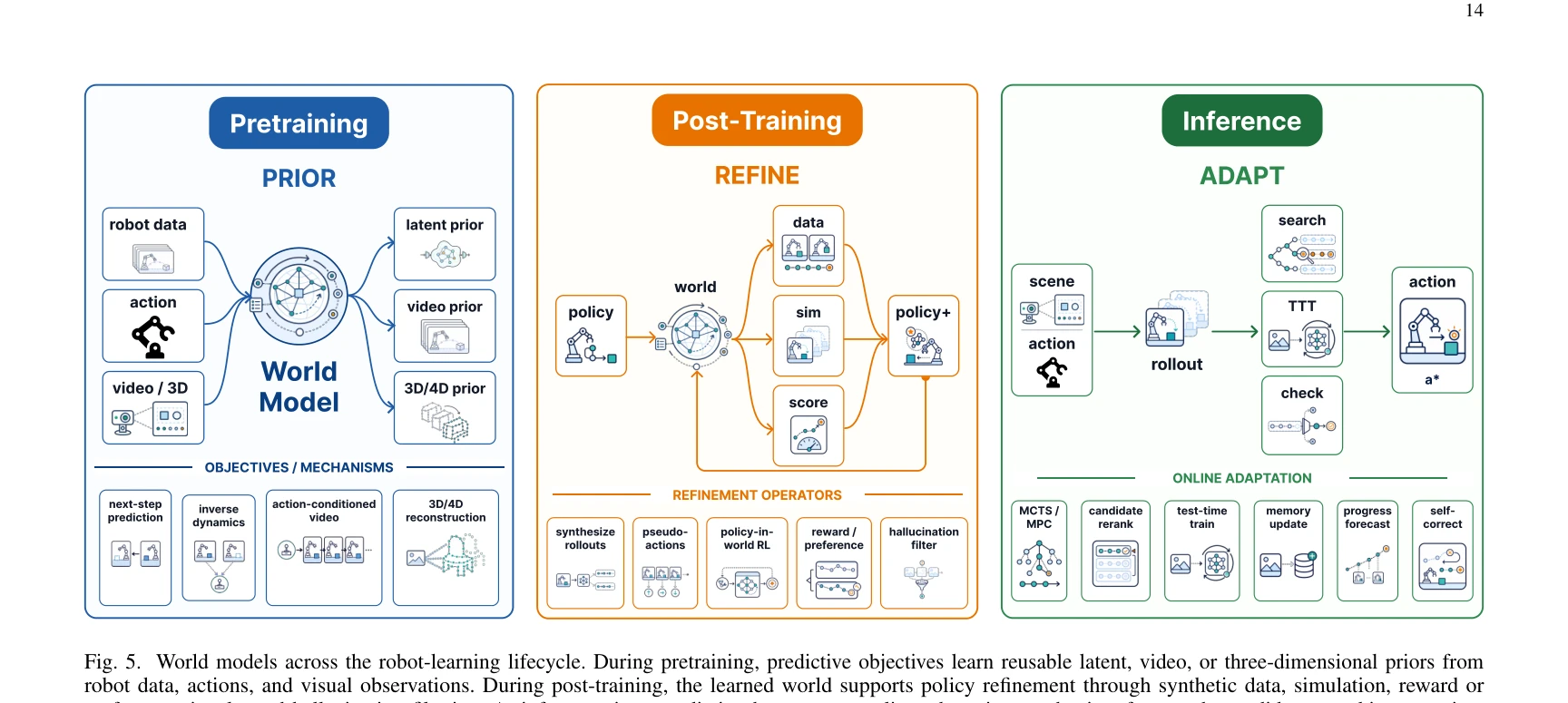
로봇 조작을 위한 world model에 대한 포괄적 서베이다. 세 가지 질문(어떤 미래 표현을 예측하는가, 예측을 행동에 어떻게 연결하는가, 학습 파이프라인의 어느 단계에서 사용되는가)을 중심으로 action-conditioned predictive system으로서의 world model을 정의하고, 다섯 가지 표현 계열과 기능적 분류를 제시한다.
Evaluation
Novelty: 4/5 Technical Soundness: 4/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 이 서베이는 로봇 조작 분야에서 fragmented된 world model 문헌을 통합하는 중요한 기여다. 세 가지 직교 축의 framework와 명확한 operational definition은 향후 연구의 설계 선택을 가이드할 수 있으며, 34개 dataset 검토와 종합 평가 프로토콜은 실질적 가치를 제공한다. 다만 closed-loop 평가 부족과 contact modeling 등 조작 고유의 도전이 여전히 미해결되어 있고, 개념적 경계의 모호성도 완전히 제거되지 않았다. 전체적으로 조작 중심의 predictive modeling을 이해하는 데 필수적인 참고문헌이지만, 구체적인 기술 혁신보다는 종합 정리의 성격이 강하다.