저자: Jingkai Sun, Qiang Zhang, Gang Han, Wen Zhao, Zhe Yong, Yan He, Jiaxu Wang, Jiahang Cao, Yijie Guo, Renjing Xu | 날짜: 2025-03-11 | URL: https://arxiv.org/abs/2503.08338📄 PDF
Essence
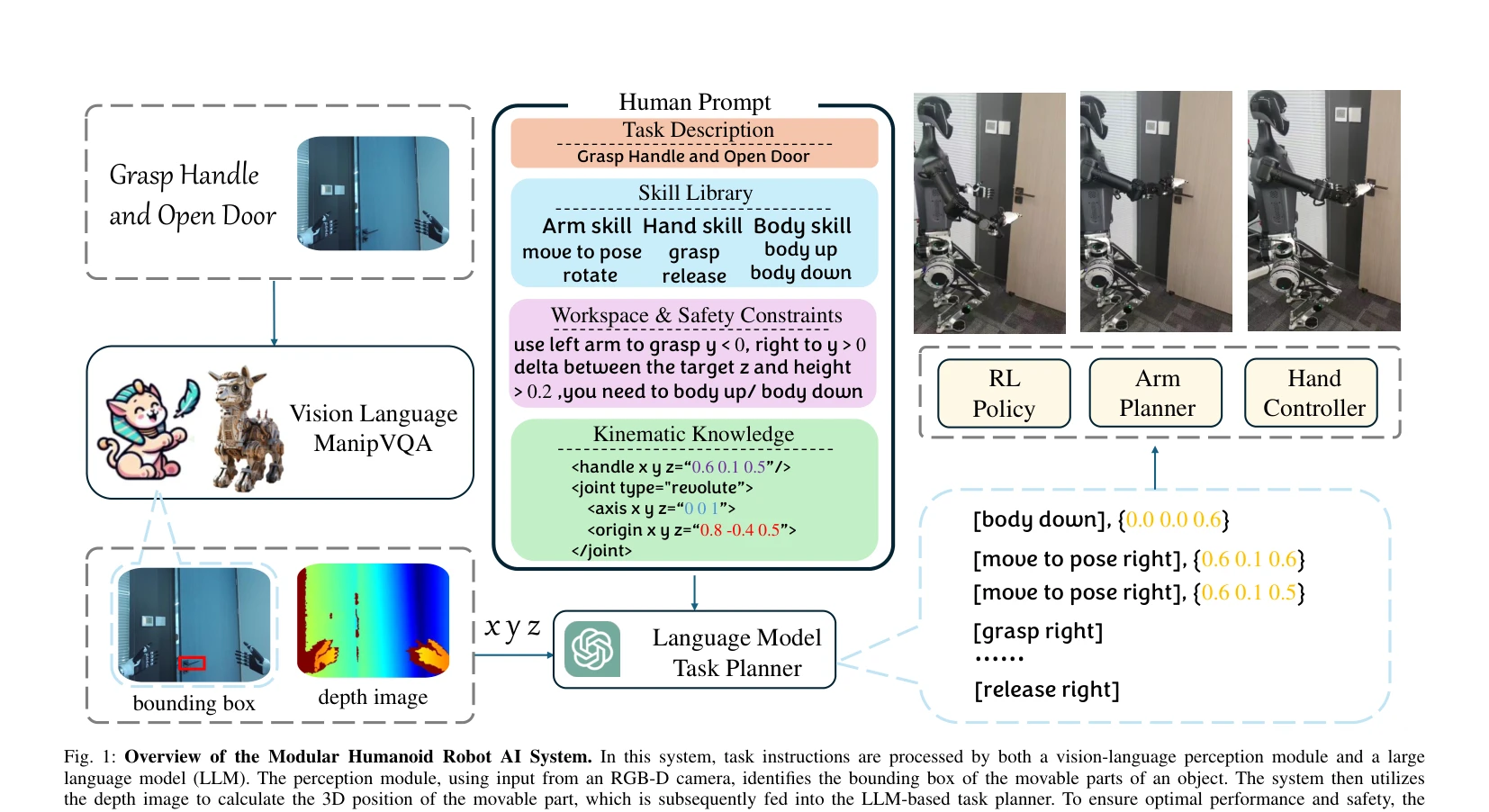
Fig. 1: Overview of the Modular Humanoid Robot AI System. In this system, task instructions are processed by both a visi
Trinity는 LLM, VLM, RL을 모듈식 계층 구조로 통합하여 humanoid robot을 제어하는 종합 AI 시스템이다. 각 모듈이 독립적으로 최적화되면서도 협력하여 복잡한 환경에서 humanoid robot의 효율적인 제어를 실현한다.
Motivation
Known: Humanoid robot 제어는 RL 기반 controller로 보행, 점프, 달리기 등의 작업을 수행해왔고, 최근 LLM과 VLM 기술이 발전하면서 semantic planning과 environmental perception 능력이 향상되었다. 그러나 기존 연구들은 간단한 로봇 구조나 상체 제어만 다루었으며, 복잡한 humanoid robot의 전신 제어와 장기 상호작용을 다루는 통합 시스템이 부족했다.
Gap: Humanoid robot 연구의 핵심 난제는 극도로 복잡한 제어 문제와 simulation-to-real 격차이다. 기존 방법들은 각 기술(RL, LLM, VLM)을 개별적으로 적용했을 뿐 실제 full-scale humanoid robot에 대한 종합적 통합 및 검증이 부족했으며, 특히 loco-manipulation 문제에서 locomotion policy와 manipulation network를 조화롭게 제어하는 접근이 미흡했다.
Why: Humanoid robot의 상용화와 실용 배포를 위해서는 언어 이해, 환경 인식, 로봇 제어가 모두 효과적으로 작동해야 하며, 이를 통해 복잡한 일상 작업을 자율적으로 수행할 수 있어야 한다. Trinity의 모듈식 통합 설계는 system interpretability와 safety를 보장하면서도 각 구성 요소의 독립적 최적화를 가능하게 한다.
Approach: Trinity는 LLM을 통해 semantic understanding과 task planning을 담당하고, VLM이 environmental perception을 수행하며, RL 기반 controller가 locomotion과 manipulation을 제어한다. 시스템은 모듈식 계층 구조로 설계되어 각 모듈이 독립적으로 최적화되면서 상호작용한다. 특히 loco-manipulation 시 lower limbs의 이동과 center of mass의 조정을 통해 balance를 유지하는 novel approach를 제시한다.
Achievement
Fig. 1: Overview of the Modular Humanoid Robot AI System. In this system, task instructions are processed by both a visi
1) 최초의 통합 시스템: LLM, VLM, RL을 humanoid robot에 처음으로 통합하여 full-scale humanoid robot 상에서 종합 검증을 완료하고 실무적 타당성을 입증했다. 2) 모듈식 계층 구조: interchangeable models을 통해 복잡한 문제를 분해·해결하며 system flexibility와 scalability를 향상시켰다. 3) 시스템 해석성 및 안전성: 다중 모듈 간 상호작용으로 interpretability를 보장하여 human-robot interaction의 안전성을 확보했다. 4) Loco-manipulation 성능: locomotion policy와 manipulation network의 분리를 통해 lower limbs와 center of mass를 협조적으로 조정하는 성능을 달성했다.
How
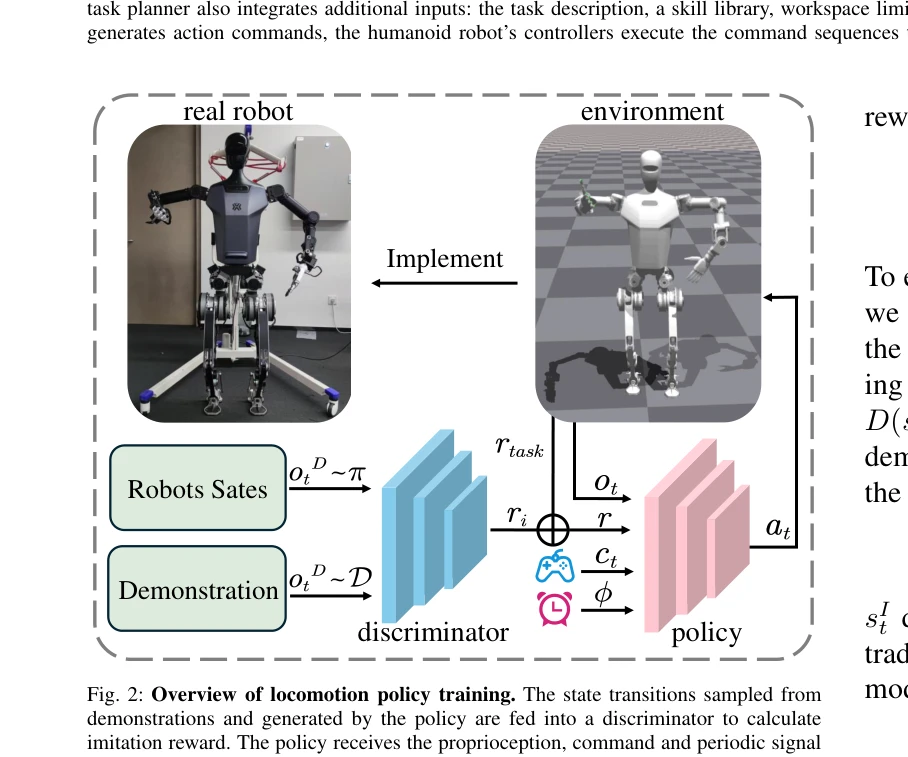
Fig. 2: Overview of locomotion policy training. The state transitions sampled from
LLM이 자연어 instruction을 semantic task로 변환하여 task planning 수행
VLM이 RGB vision input으로부터 scene understanding 및 object interaction 정보 추출
RL-based locomotion policy가 simulation training 기반으로 보행 제어 학습
Manipulation network가 arm skill과 hand skill을 hierarchical하게 제어
모듈 간 coordination mechanism으로 loco-manipulation 작업에서 balance 유지
Originality
최초의 통합: RL, LLM, VLM을 단일 humanoid robot AI system으로 통합한 것이 novel하다.
모듈식 설계: Interchangeable model components를 통해 유연성과 해석성을 동시에 확보하는 architecture가 독창적이다.
Loco-manipulation 접근: Locomotion policy와 manipulation을 분리하면서도 center of mass 조정을 통해 balance를 유지하는 방법이 새로운 기여이다.
Limitation & Further Study
Simulation-to-real gap: RL training이 simulation 환경에 크게 의존하므로 real-world 환경의 예측 불가능한 dynamic에 대한 generalization 성능이 제한될 수 있다.
데이터 요구사항: VLM과 LLM의 fine-tuning이 필요한 경우 대규모 domain-specific 데이터 수집이 필요할 수 있다.
Computation overhead: 세 개의 large model을 동시에 운영하는 computational cost가 real-time control에 미칠 영향이 명확하지 않다.
평가 범위 제한: 논문이 특정 task(door opening 등)에 대한 결과만 제시하고 있어 다양한 일상 작업에 대한 generalization 성능 검증이 필요하다.
후속 연구 방향:
Online learning과 adaptation 메커니즘을 추가하여 sim-to-real transfer 성능 향상
총평: Trinity는 RL, LLM, VLM을 모듈식 계층 구조로 통합하여 humanoid robot의 복잡한 제어 문제를 체계적으로 해결하는 혁신적인 접근법을 제시한다. Full-scale humanoid robot에 대한 종합 검증과 loco-manipulation 성능이 주요 강점이나, 더 광범위한 작업에 대한 평가와 sim-to-real transfer 성능의 명확한 분석이 필요하다. 전반적으로 humanoid robotics 분야의 중요한 진전을 대표하는 양질의 시스템 논문이다.