Essence
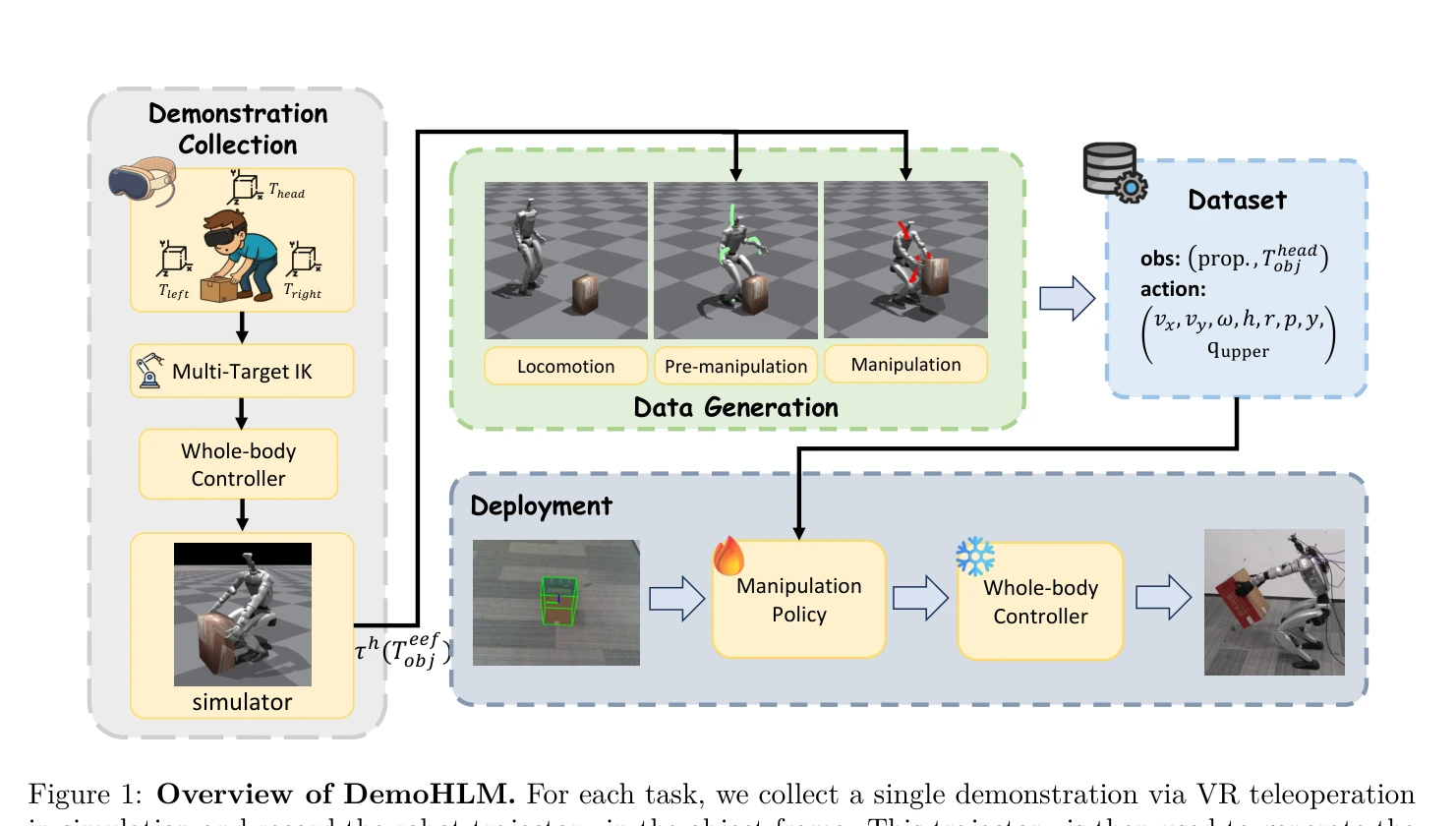
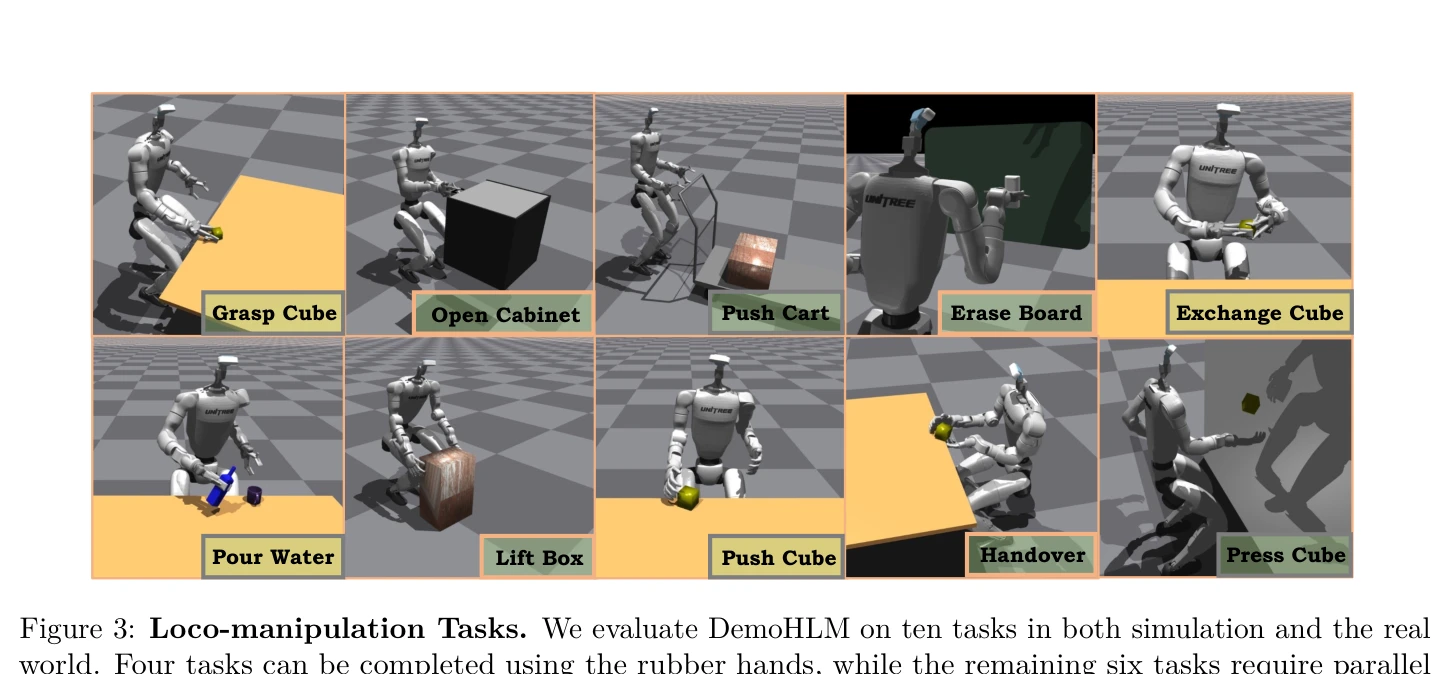
Figure 1: Overview of DemoHLM. For each task, we collect a single demonstration via VR teleoperation
DemoHLM은 단일 시뮬레이션 데모로부터 합성 데이터를 생성하여 휴머노이드 로봇의 일반화된 로코-매니퓰레이션 정책을 학습하는 프레임워크이다. 계층적 제어 구조를 통해 저수준 전신 제어기와 고수준 조작 정책을 통합하여 실제 로봇에 시뮬레이션-현실 전이를 달성한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 본 논문은 MimicGen 개념을 휴머노이드 로코-매니퓰레이션으로 확장하여 단일 데모로부터 확장 가능한 데이터 생성을 실현하고, 계층적 제어 구조를 통해 현실 로봇에 효과적인 시뮬레이션-현실 전이를 달성했다. 데이터 효율성과 다중 작업 일반화 측면에서 강력한 기여를 제공하며, 실제 로봇 검증이 완전하여 실질적 가치가 높다.