Essence
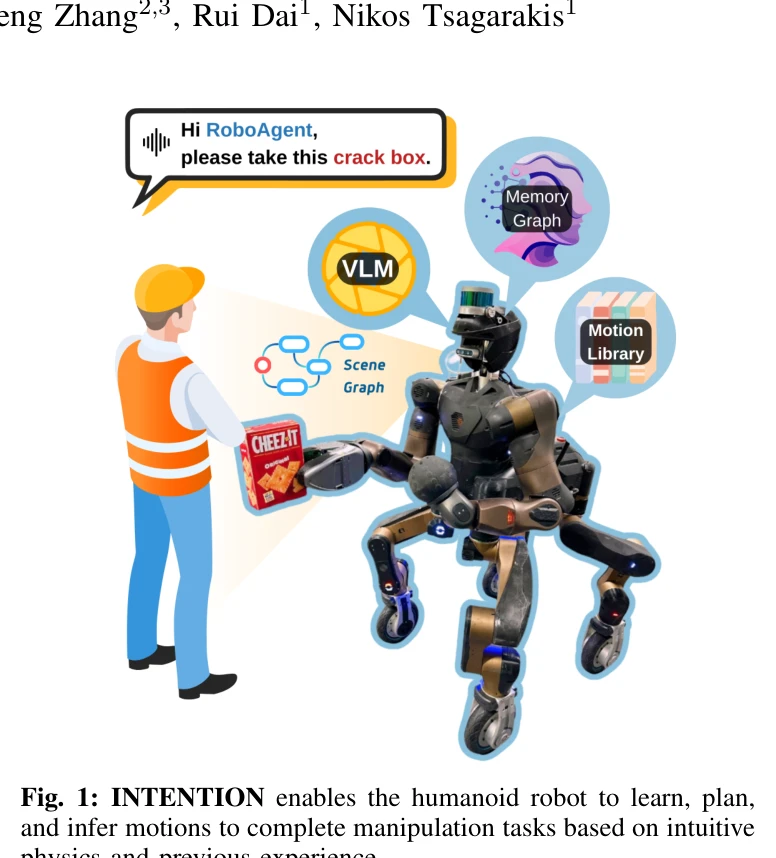
Fig. 1: INTENTION enables the humanoid robot to learn, plan,
INTENTION은 Vision-Language Models 기반의 Intuitive Perceptor와 Memory Graph를 통합하여 휴머노이드 로봇이 상호작용 경험으로부터 직관적 물리 이해를 학습하고 새로운 조작 작업에 자율적으로 적응하는 프레임워크를 제안한다.
저자: Jin Wang, Weijie Wang, Boyuan Deng, Heng Zhang, Rui Dai, Nikos Tsagarakis | 날짜: 2025-08-06 | URL: https://arxiv.org/abs/2508.04931 📄 PDF
Fig. 1: INTENTION enables the humanoid robot to learn, plan,
INTENTION은 Vision-Language Models 기반의 Intuitive Perceptor와 Memory Graph를 통합하여 휴머노이드 로봇이 상호작용 경험으로부터 직관적 물리 이해를 학습하고 새로운 조작 작업에 자율적으로 적응하는 프레임워크를 제안한다.
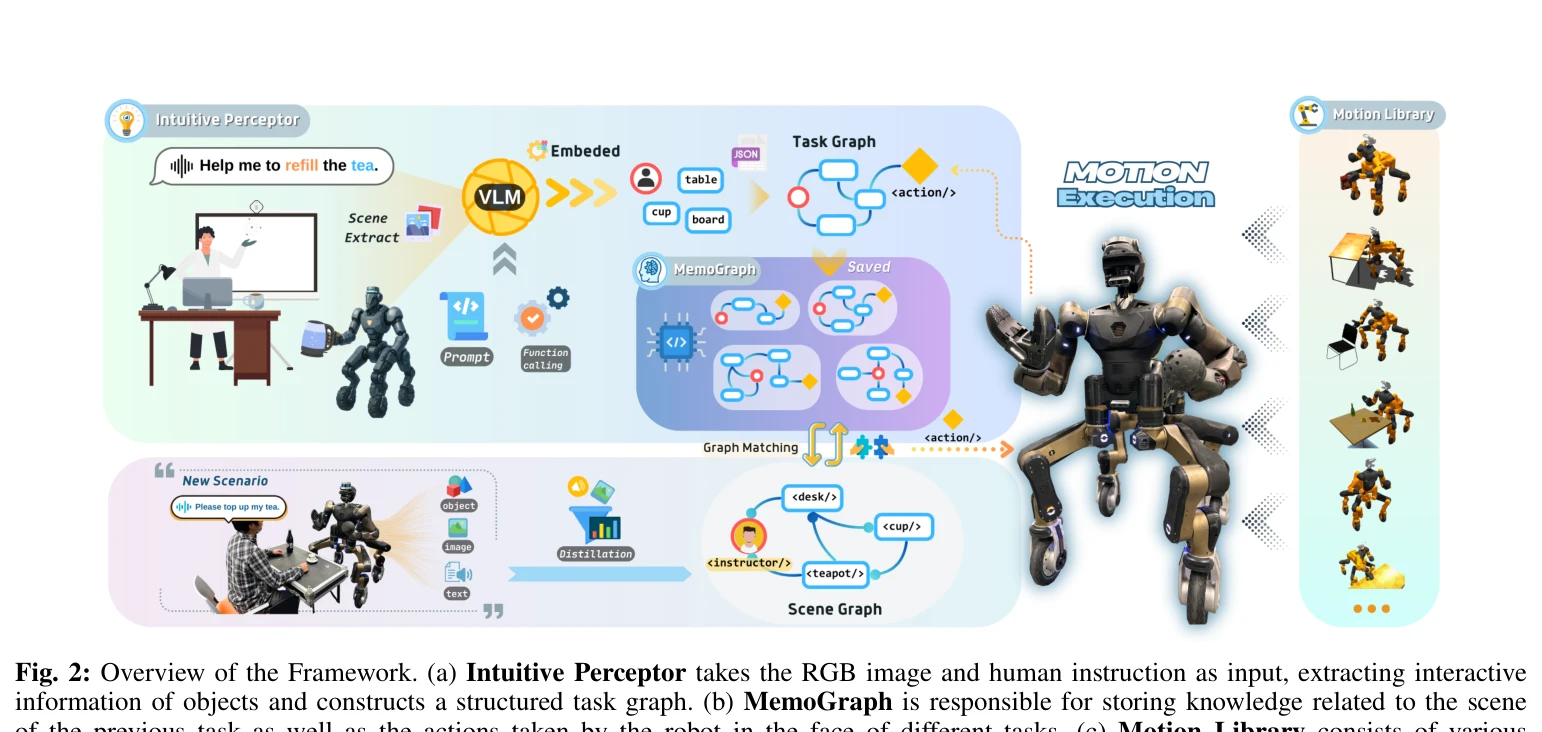
Fig. 2: Overview of the Framework. (a) Intuitive Perceptor takes the RGB image and human instruction as input, extractin
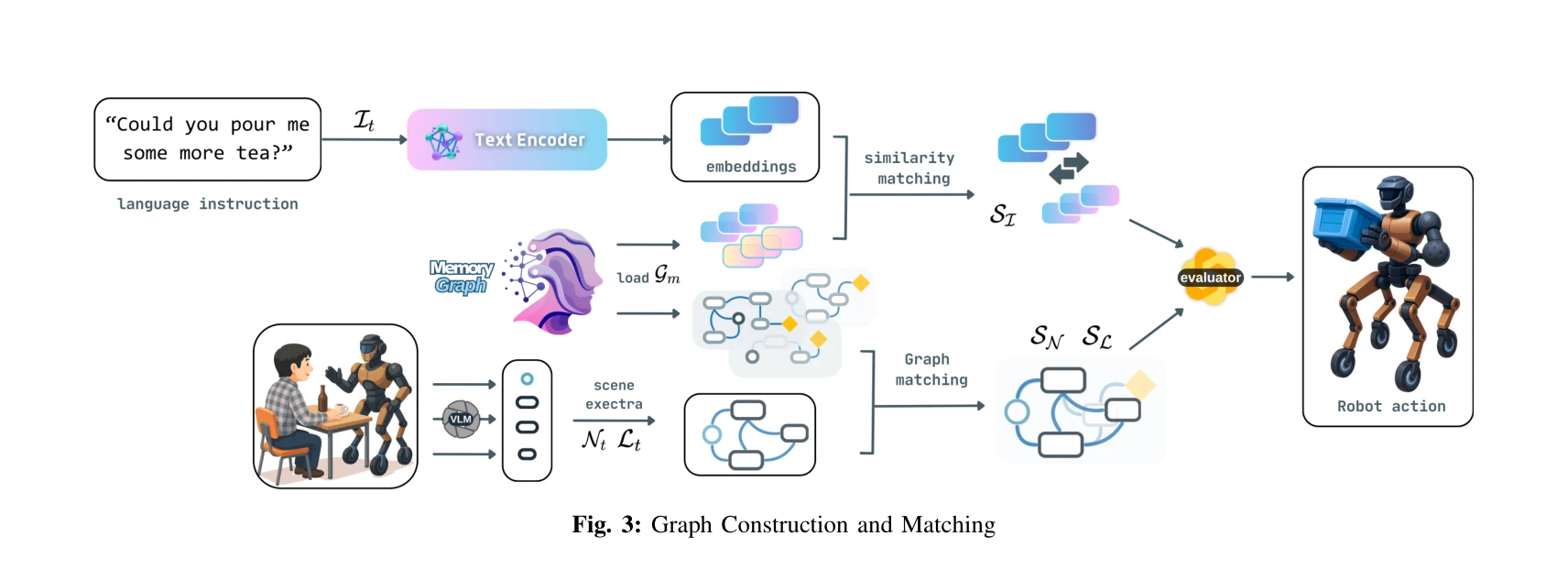
Fig. 3: Graph Construction and Matching
총평: INTENTION은 VLM 기반 지각과 상호작용 메모리를 결합하여 휴머노이드 로봇의 적응형 조작을 혁신적으로 제시하는 연구로, 개념과 설계는 우수하나 실험적 검증과 기술적 세부 구현의 엄밀성 강화가 필요하다.