Essence
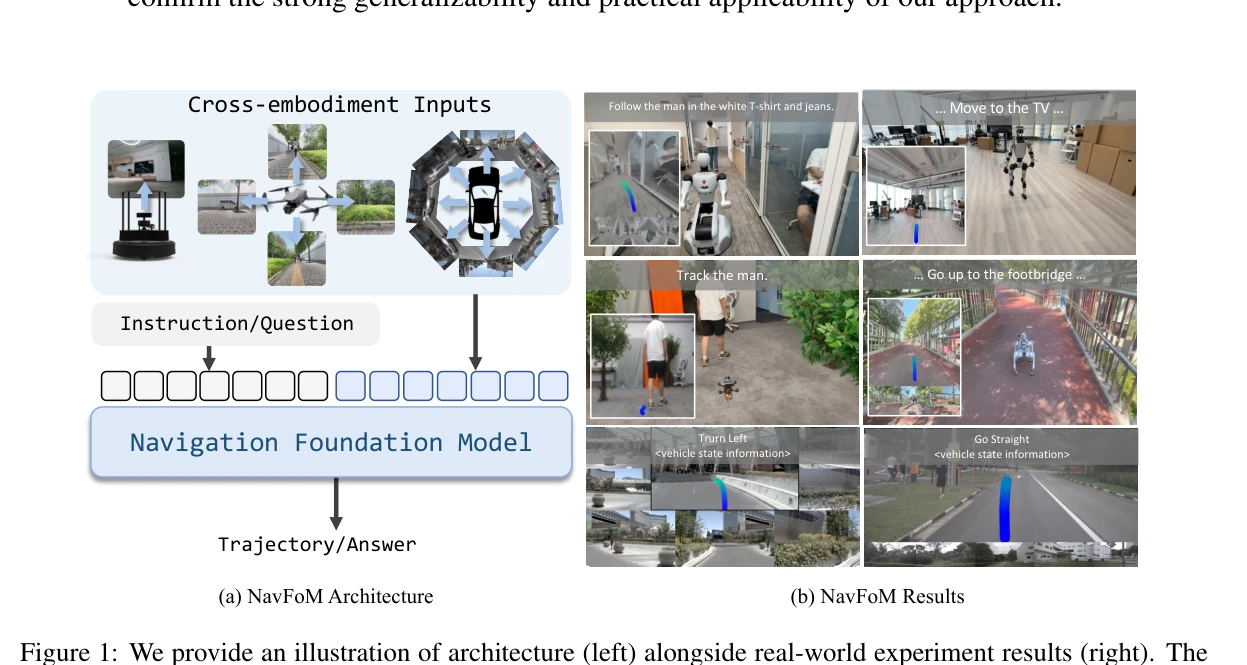
Figure 1: We provide an illustration of architecture (left) alongside real-world experiment results (right). The
NavFoM은 8백만 개의 네비게이션 샘플로 학습된 크로스-구현체·크로스-태스크 기반 네비게이션 모델로, 다양한 로봇 플랫폼과 네비게이션 작업에서 미세 조정 없이 최첨단 성능을 달성한다.
저자: Jiazhao Zhang, Anqi Li, Yunpeng Qi, Minghan Li, Jiahang Liu, Shaoan Wang, Haoran Liu, Gengze Zhou, Yuze Wu, Xingxing Li, Yuxin Fan, Wenjun Li, Zhibo Chen, Fei Gao, Qi Wu, Zhizheng Zhang, He Wang | 날짜: 2025-09-15 | URL: https://arxiv.org/abs/2509.12129 📄 PDF
Figure 1: We provide an illustration of architecture (left) alongside real-world experiment results (right). The
NavFoM은 8백만 개의 네비게이션 샘플로 학습된 크로스-구현체·크로스-태스크 기반 네비게이션 모델로, 다양한 로봇 플랫폼과 네비게이션 작업에서 미세 조정 없이 최첨단 성능을 달성한다.
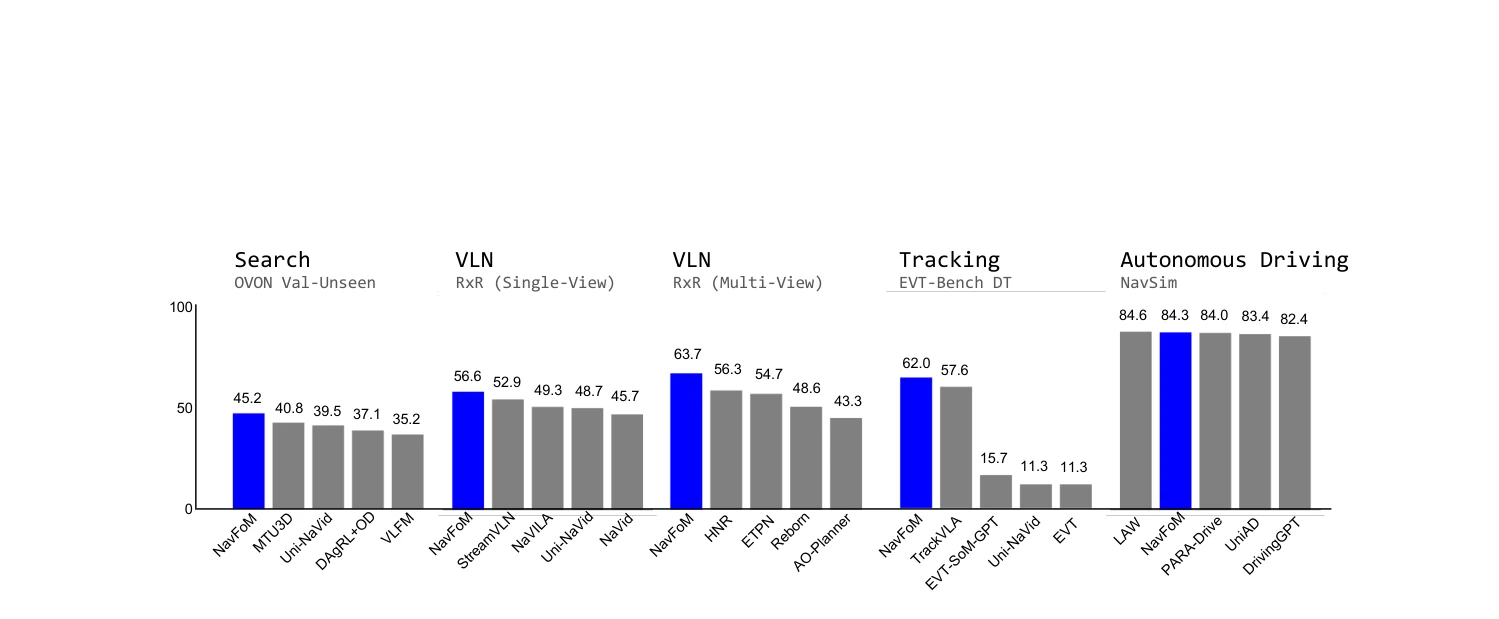
Figure 2: Benchmark performance of NavFoM, we compare NavFoM with SOTA baselines on each bench-
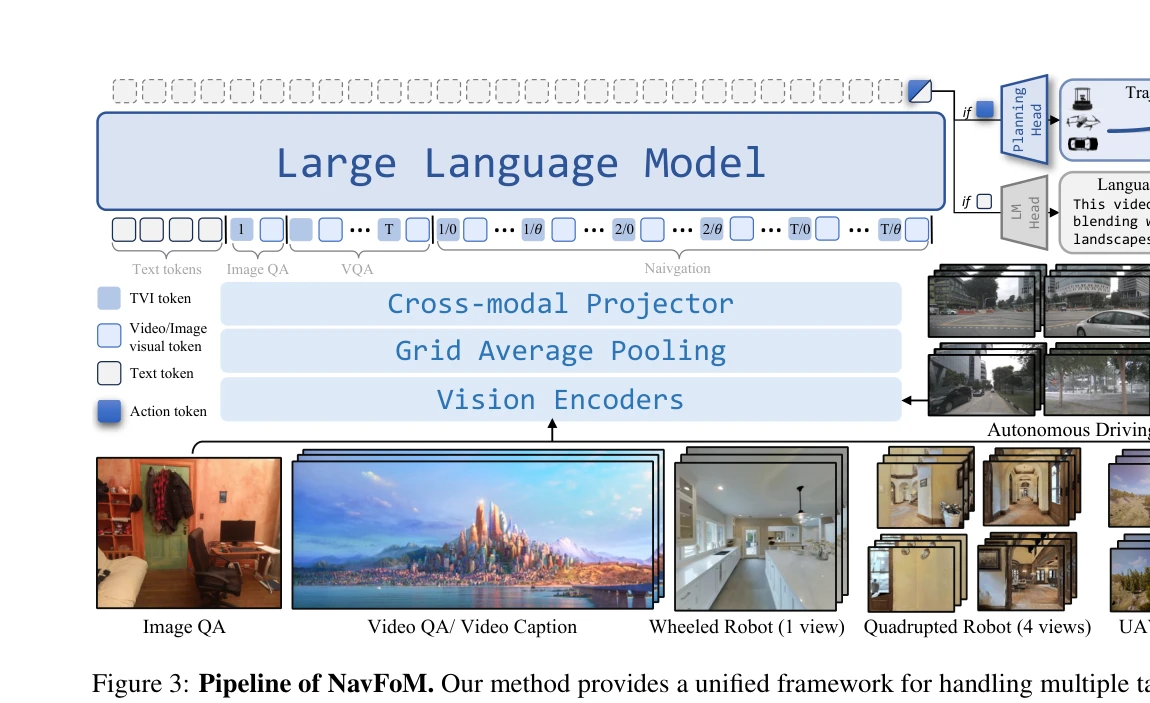
Figure 3: Pipeline of NavFoM. Our method provides a unified framework for handling multiple tasks, includ-
총평: NavFoM은 신체화된 AI 분야에서 크로스-구현체·크로스-태스크 네비게이션을 처음으로 통합적으로 해결한 대규모 기초 모델로, TVI 토큰과 BATS 전략의 혁신적 설계로 다양한 로봇 플랫폼과 네비게이션 작업에서 미세 조정 없이 강력한 일반화 능력을 입증하였다.