저자: Chen Gao, Liankai Jin, Xingyu Peng, Jiazhao Zhang, Yue Deng, Annan Li, He Wang, Si Liu | 날짜: 2025-06-11 | URL: https://arxiv.org/abs/2506.09839 📄 PDF
Essence
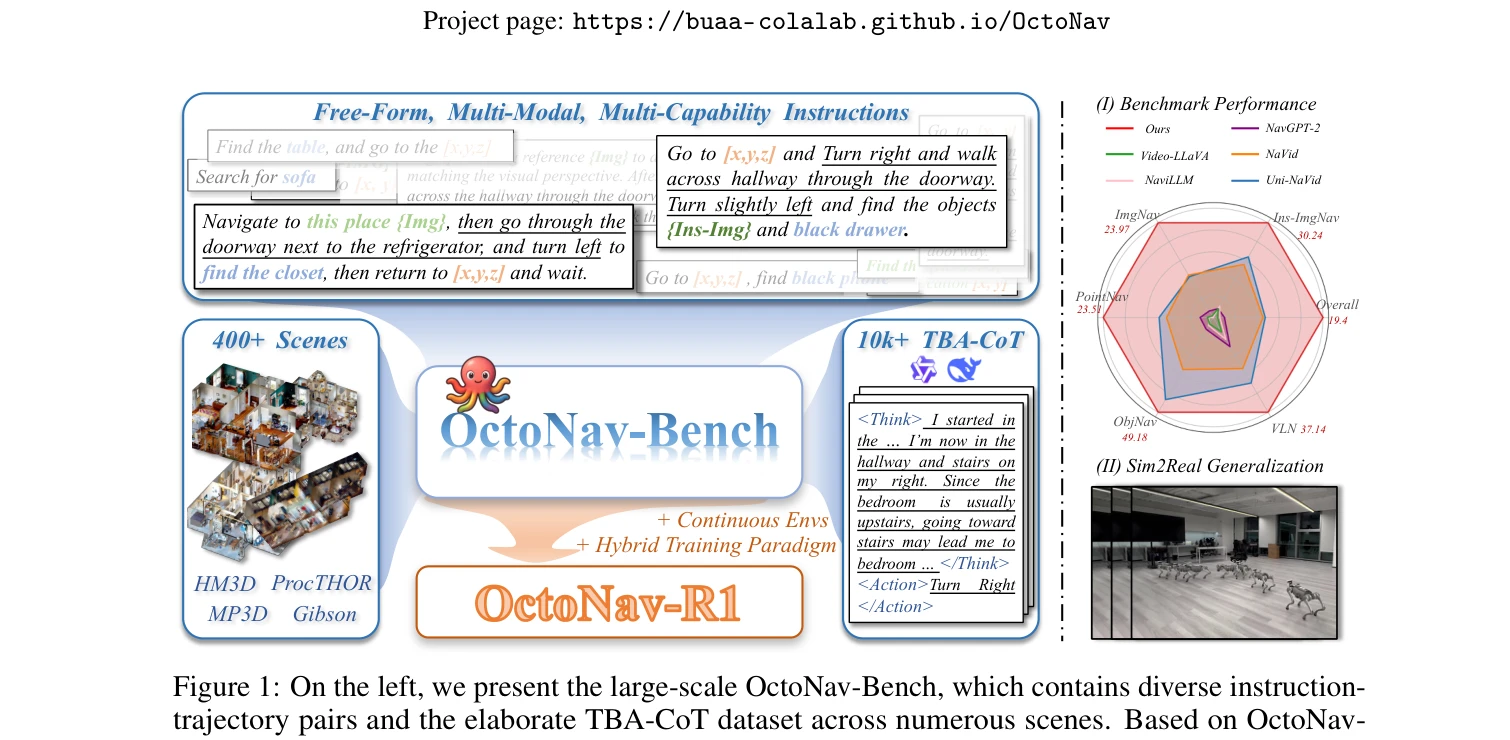
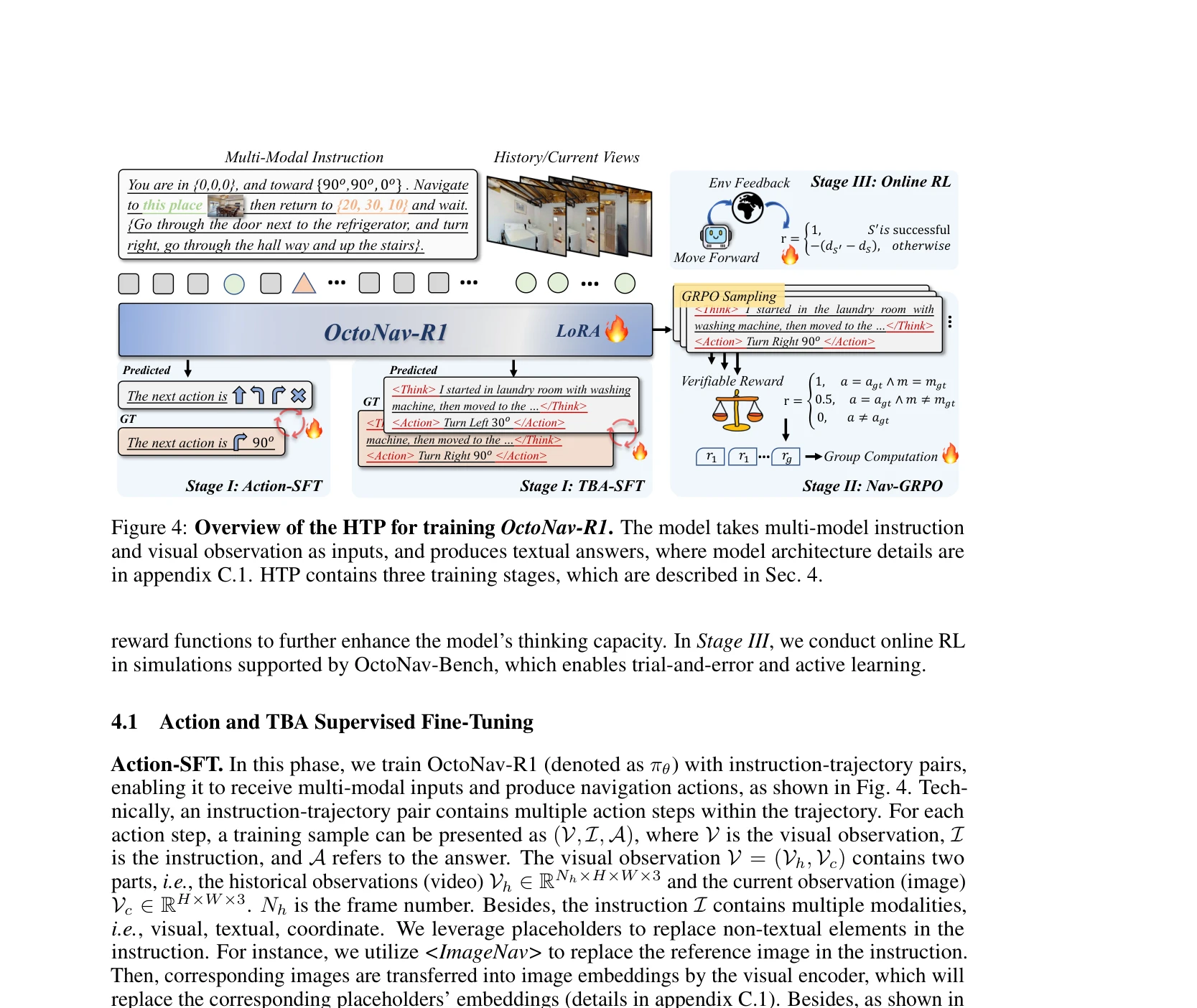
Figure 1: On the left, we present the large-scale OctoNav-Bench, which contains diverse instruction-
자유형식의 멀티모달 멀티기능 지시를 따를 수 있는 일반화된 embodied navigation 에이전트를 위해 OctoNav-Bench 벤치마크와 OctoNav-R1 방법을 제안한다. Think-Before-Action 추론을 통해 복잡한 네비게이션 작업에서 향상된 성능을 달성한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 본 논문은 fragmented된 embodied navigation 작업들을 통합하는 포괄적인 벤치마크와 방법을 처음 제시하며, Think-Before-Action을 통한 명시적 reasoning 도입으로 일반화된 navigation 에이전트 개발에 중요한 기여를 한다. 초기 sim2real 결과는 실용적 가능성을 시사하지만, 추가 실제 환경 검증이 필요하다.