Essence
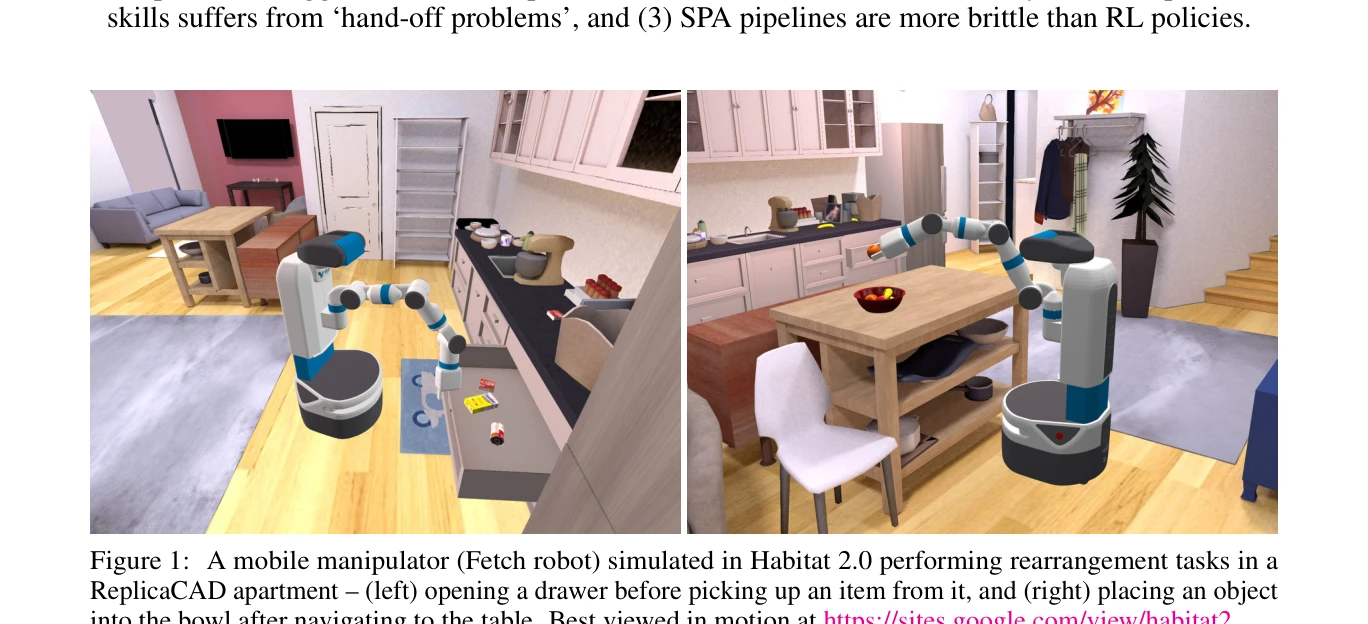
Figure 1: A mobile manipulator (Fetch robot) simulated in Habitat 2.0 performing rearrangement tasks in a
Habitat 2.0는 가정용 로봇의 물체 재배치 작업을 학습하기 위한 고성능 물리 시뮬레이션 플랫폼이며, ReplicaCAD 데이터셋, 최적화된 시뮬레이터, Home Assistant Benchmark를 제공한다.
저자: Andrew Szot, Alex Clegg, Eric Undersander, Erik Wijmans, Yili Zhao, John Turner, Noah Maestre, Mustafa Mukadam, Devendra Chaplot, Oleksandr Maksymets, Aaron Gokaslan, Vladimir Vondrus, Sameer Dharur, Franziska Meier, Wojciech Galuba, Angel Chang, Zsolt Kira, Vladlen Koltun, Jitendra Malik, Manolis Savva, Dhruv Batra | 날짜: 2021-06-28 | URL: https://arxiv.org/abs/2106.14405 📄 PDF
Figure 1: A mobile manipulator (Fetch robot) simulated in Habitat 2.0 performing rearrangement tasks in a
Habitat 2.0는 가정용 로봇의 물체 재배치 작업을 학습하기 위한 고성능 물리 시뮬레이션 플랫폼이며, ReplicaCAD 데이터셋, 최적화된 시뮬레이터, Home Assistant Benchmark를 제공한다.
Figure 1: A mobile manipulator (Fetch robot) simulated in Habitat 2.0 performing rearrangement tasks in a
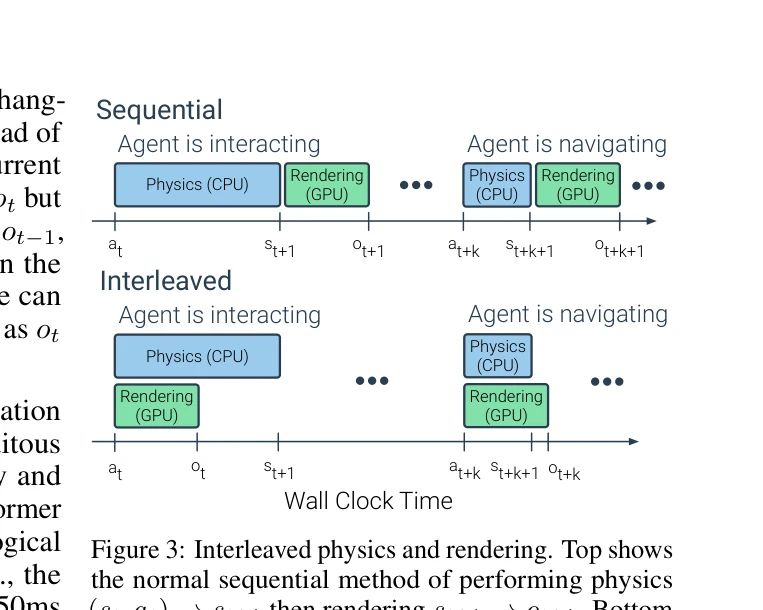
Figure 3: Interleaved physics and rendering. Top shows
총평: Habitat 2.0은 embodied AI 연구를 위한 완전한 인프라(데이터, 시뮬레이터, 벤치마크)를 제공하며, 100배 성능 향상으로 대규모 실험을 가능하게 하고, RL vs SPA 비교를 통해 이동 조작 문제에 대한 실질적 통찰을 제시한다.