Essence
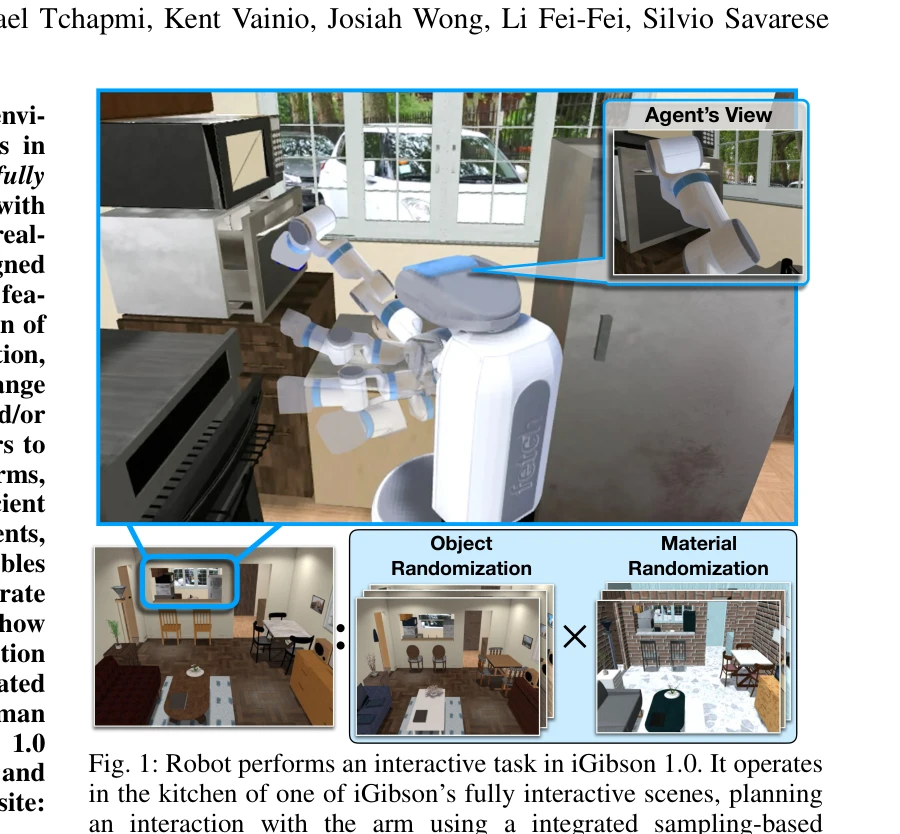
Fig. 1: Robot performs an interactive task in iGibson 1.0. It operates
iGibson 1.0은 15개의 완전히 상호작용 가능한 현실적 실내 장면(108개 방)을 포함하는 로봇 시뮬레이션 환경으로, 대규모 장면에서 조작과 네비게이션을 포함한 대화형 작업을 학습할 수 있게 한다.
저자: Bokui Shen, Fei Xia, Chengshu Li, Roberto Martín-Martín, Linxi Fan, Guanzhi Wang, Claudia Pérez-D'Arpino, Shyamal Buch, Sanjana Srivastava, Lyne P. Tchapmi, Micael E. Tchapmi, Kent Vainio, Josiah Wong, Li Fei-Fei, Silvio Savarese | 날짜: 2020-12-05 | URL: https://arxiv.org/abs/2012.02924 📄 PDF
Fig. 1: Robot performs an interactive task in iGibson 1.0. It operates
iGibson 1.0은 15개의 완전히 상호작용 가능한 현실적 실내 장면(108개 방)을 포함하는 로봇 시뮬레이션 환경으로, 대규모 장면에서 조작과 네비게이션을 포함한 대화형 작업을 학습할 수 있게 한다.
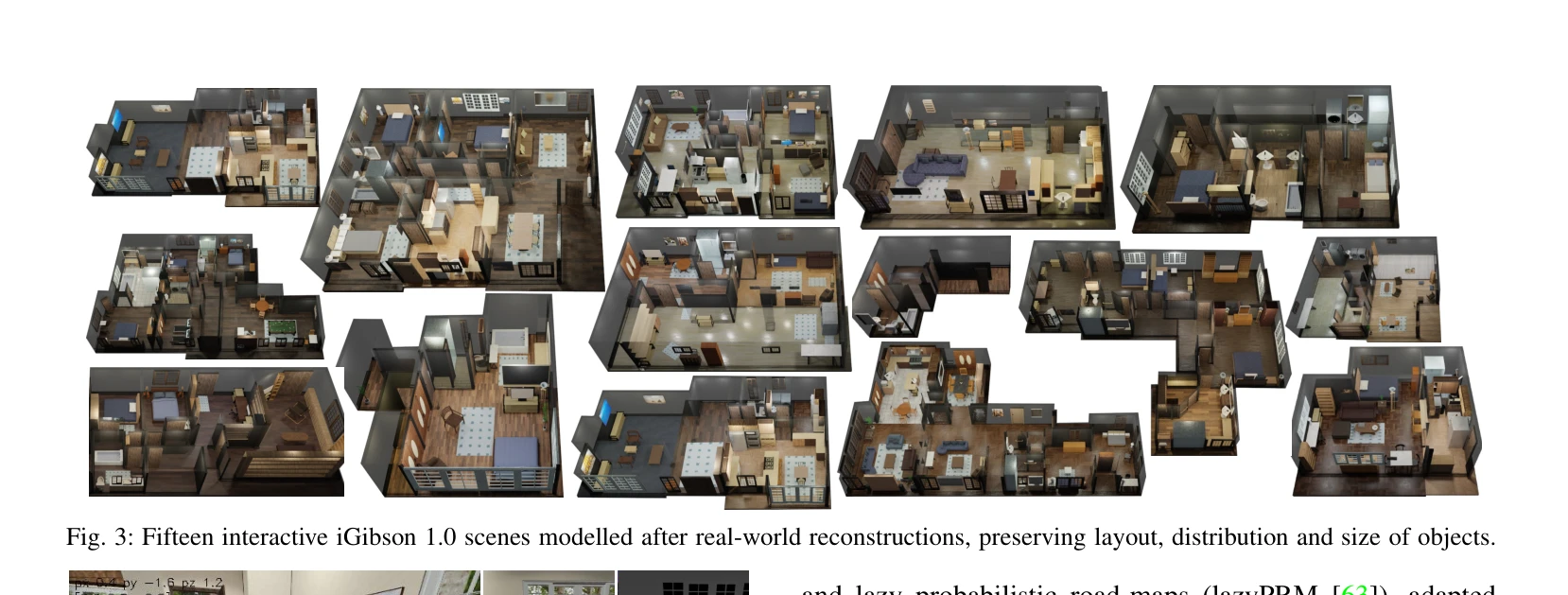
Fig. 3: Fifteen interactive iGibson 1.0 scenes modelled after real-world reconstructions, preserving layout, distributio
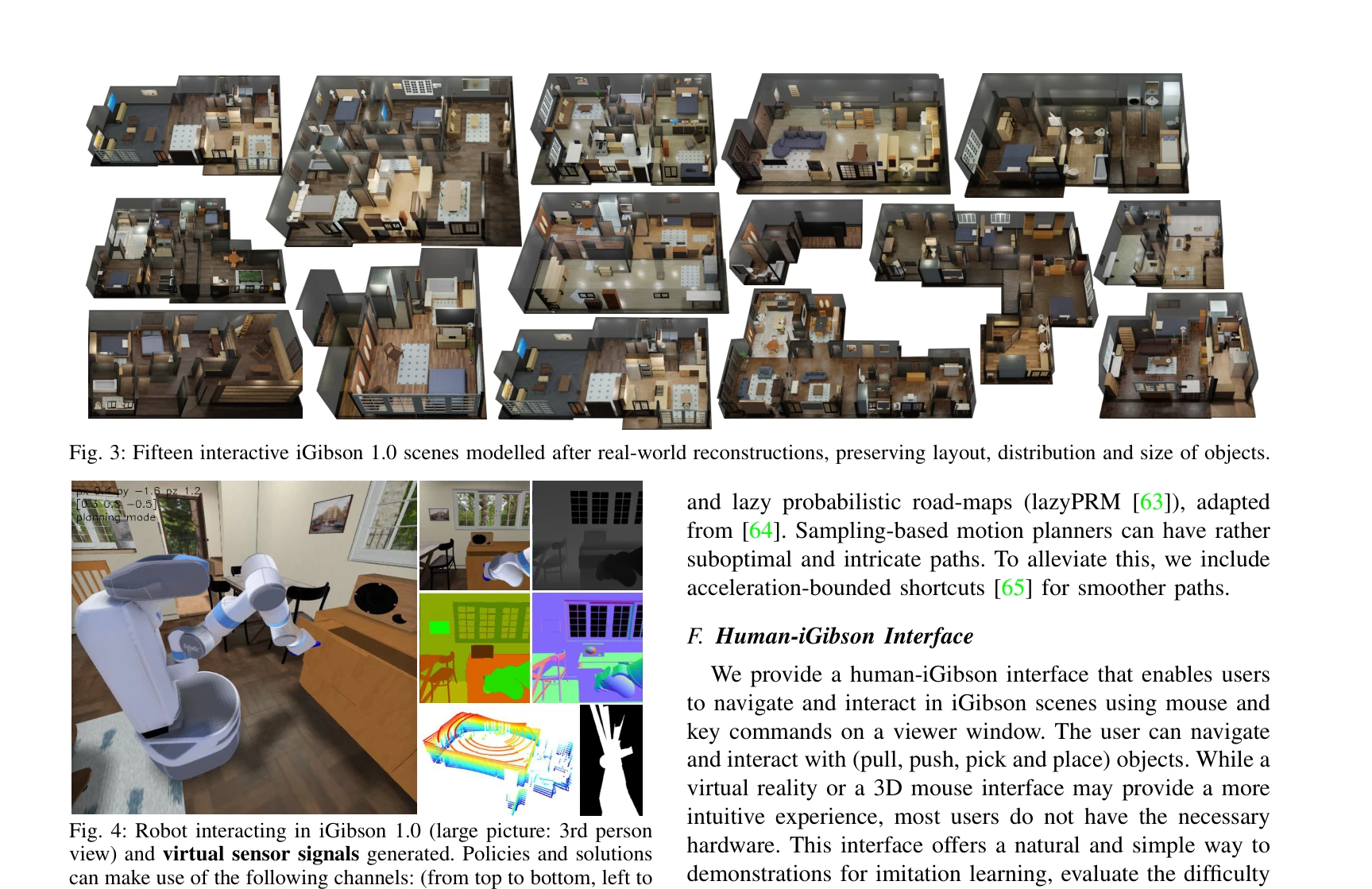
Fig. 4: Robot interacting in iGibson 1.0 (large picture: 3rd person
총평: iGibson 1.0은 대규모 현실적 환경에서 완전한 물리 기반 상호작용을 지원하는 획기적인 로봇 시뮬레이션 플랫폼으로, 조작, 모바일 조작, 네비게이션 등 다양한 embodied AI 작업 연구를 가능하게 한다. 풍부한 도구 지원과 오픈소스 공개를 통해 로봇공학 커뮤니티에 큰 영향을 미칠 것으로 기대된다.