Essence
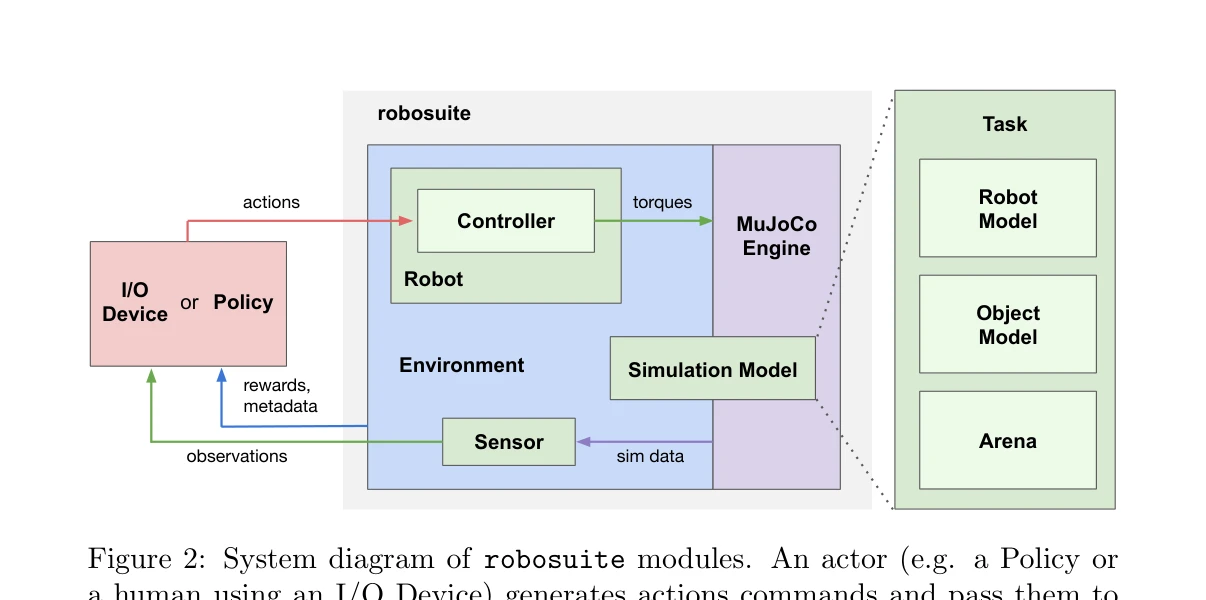
Figure 2: System diagram of robosuite modules. An actor (e.g. a Policy or
robosuite는 MuJoCo 물리 엔진을 기반으로 하는 모듈식 로봇 시뮬레이션 프레임워크로, 로봇 학습 연구를 위한 벤치마크 환경과 재현 가능한 실험 환경을 제공한다.
저자: Yuke Zhu, Josiah Wong, Ajay Mandlekar, Roberto Martín-Martín, Abhishek Joshi, Kevin Lin, Abhiram Maddukuri, Soroush Nasiriany, Yifeng Zhu | 날짜: 2020-09-25 | URL: https://arxiv.org/abs/2009.12293 📄 PDF
Figure 2: System diagram of robosuite modules. An actor (e.g. a Policy or
robosuite는 MuJoCo 물리 엔진을 기반으로 하는 모듈식 로봇 시뮬레이션 프레임워크로, 로봇 학습 연구를 위한 벤치마크 환경과 재현 가능한 실험 환경을 제공한다.
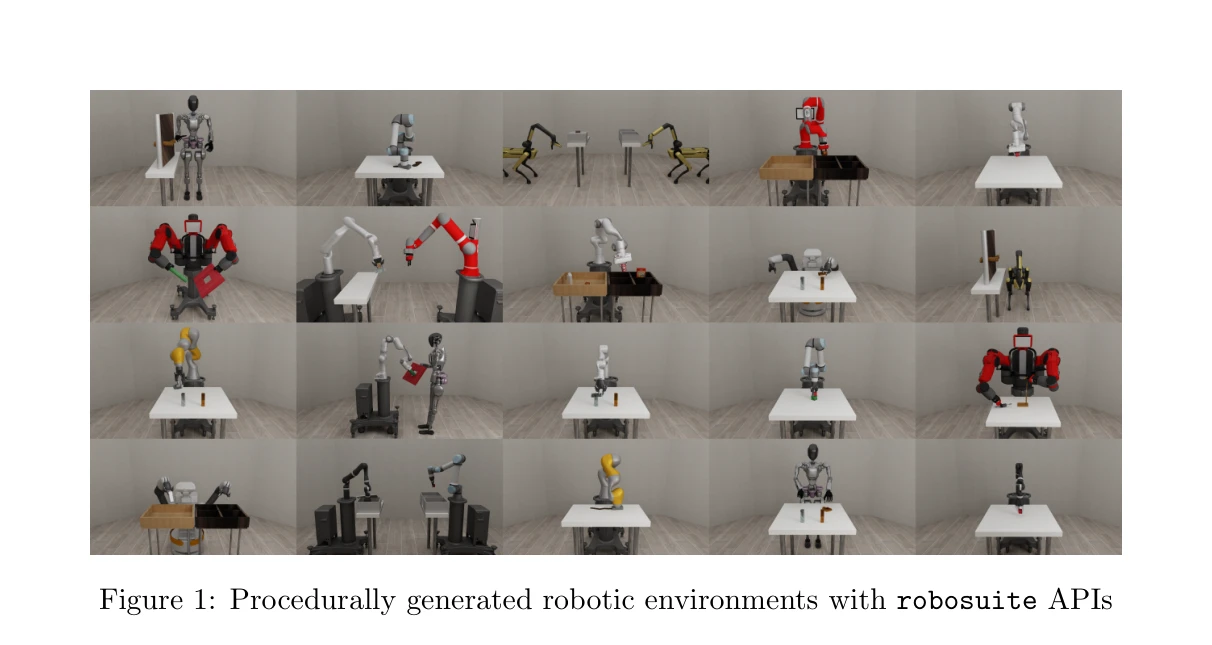
Figure 1: Procedurally generated robotic environments with robosuite APIs
Figure 2: System diagram of robosuite modules. An actor (e.g. a Policy or
총평: robosuite는 로봇 학습 커뮤니티를 위한 포괄적이고 잘 설계된 오픈소스 프레임워크로, 모듈식 아키텍처와 표준화된 벤치마크를 통해 재현 가능한 연구를 촉진하며 AI-로보틱스 교차 분야의 진입 장벽을 현저히 낮춘다.