Essence
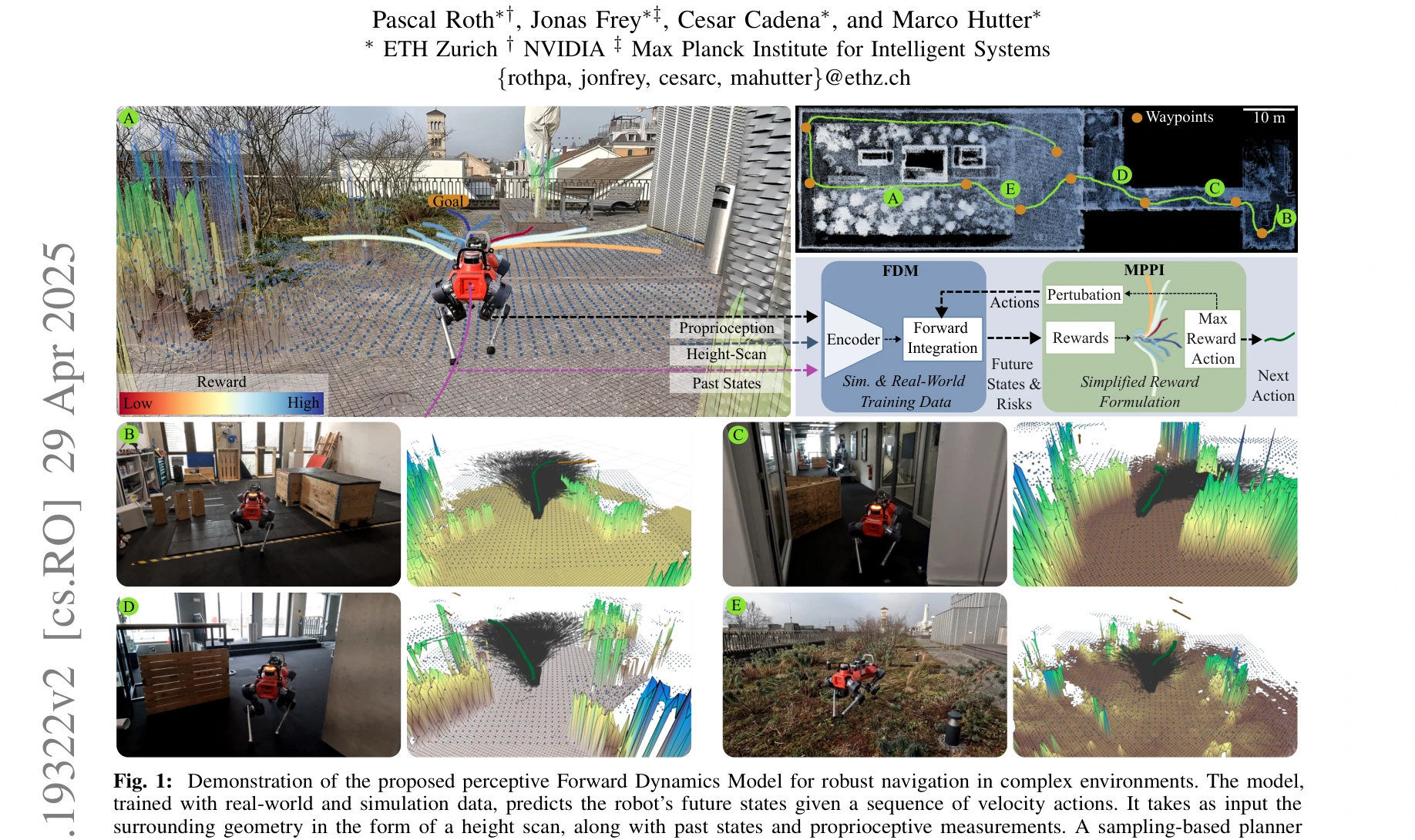
Fig. 1: Demonstration of the proposed perceptive Forward Dynamics Model for robust navigation in complex environments. T
본 논문은 시뮬레이션과 실세계 데이터로 학습한 지각형 Forward Dynamics Model (FDM)을 제안하여, 복잡한 지형에서 사족 로봇의 안전한 네비게이션을 실현한다. 이 FDM을 MPPI 플래닝 프레임워크에 통합하여 복잡한 비용 함수 튜닝 없이 안전한 경로 계획을 가능하게 한다.