저자: Wenzhe Cai, Jiaqi Peng, Yuqiang Yang, Yujian Zhang, Meng Wei, Hanqing Wang, Yilun Chen, Tai Wang, Jiangmiao Pang | 날짜: 2025-05-13 | URL: https://arxiv.org/abs/2505.08712 📄 PDF
Essence
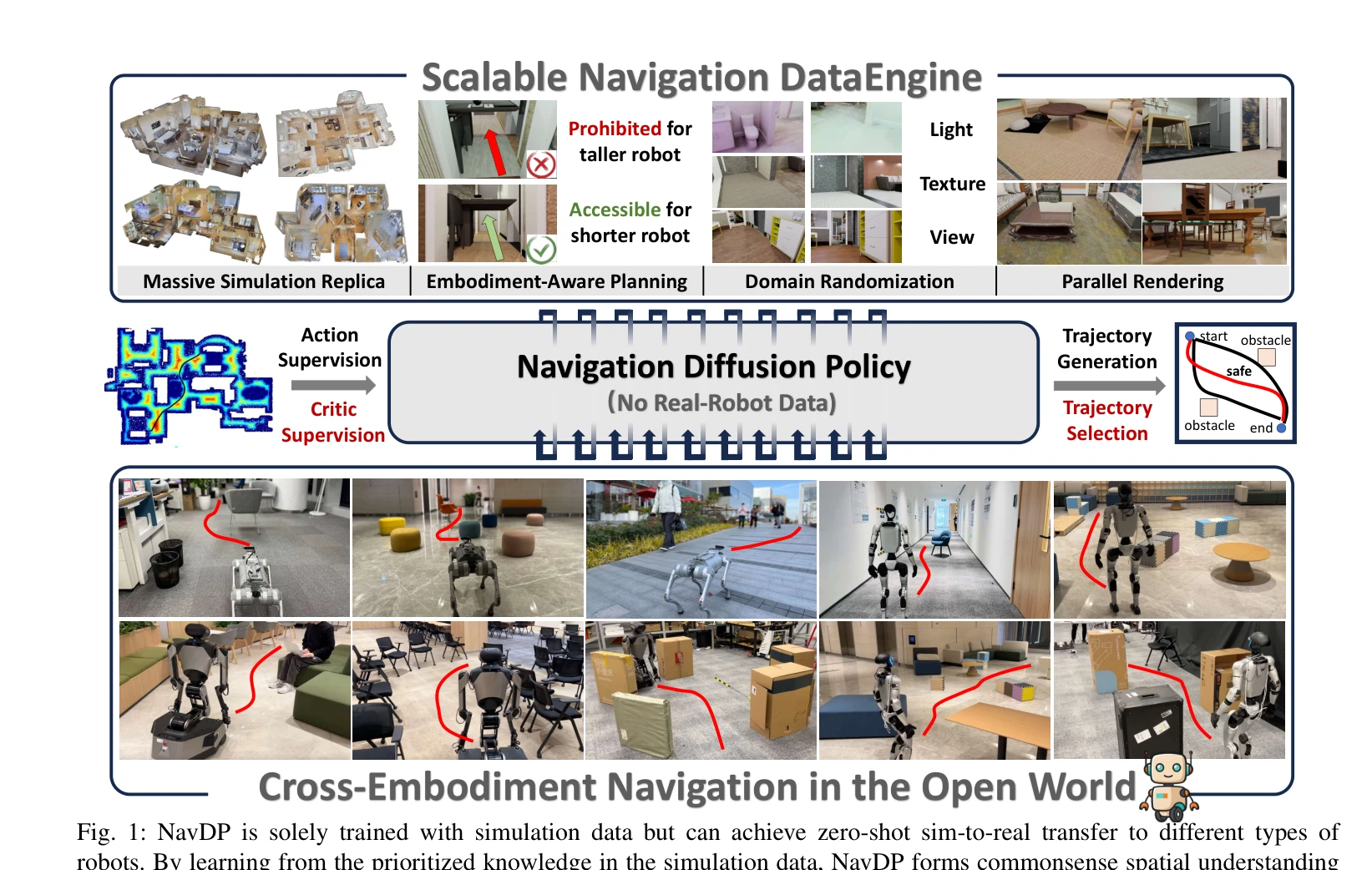
Fig. 1: NavDP is solely trained with simulation data but can achieve zero-shot sim-to-real transfer to different types o
NavDP는 시뮬레이션에서만 학습한 unified transformer 기반 diffusion policy로, privileged information을 활용한 trajectory generation과 critic value prediction을 통해 zero-shot sim-to-real transfer를 달성한다.
Evaluation
Novelty: 4/5 Technical Soundness: 4/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: NavDP는 시뮬레이션의 privileged information을 효과적으로 활용하는 unified transformer 아키텍처와 대규모 효율적 데이터 엔진으로 navigation 분야에서 significant advance를 달성했으며, zero-shot sim-to-real transfer와 cross-embodiment 일반화 측면에서 강력한 empirical 결과를 보여준다.