Essence
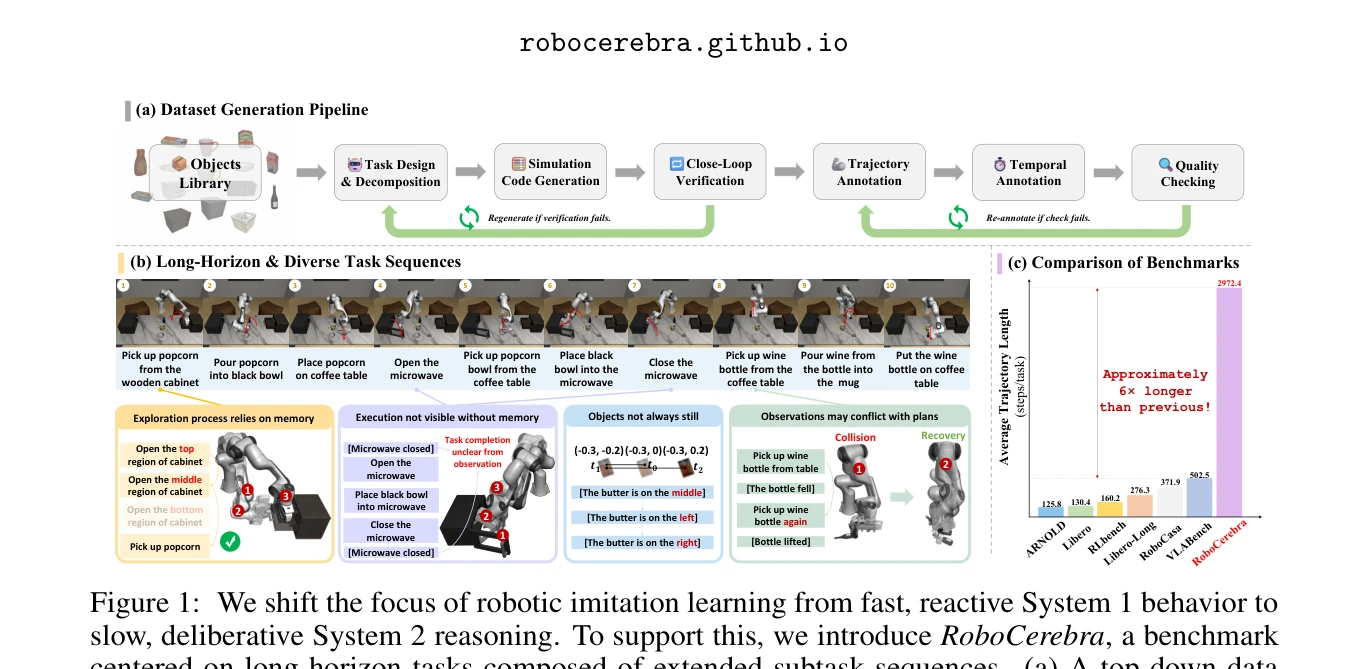
Figure 1: We shift the focus of robotic imitation learning from fast, reactive System 1 behavior to
RoboCerebra는 장기간 로봇 조작 작업 평가를 위한 대규모 벤치마크로, VLM의 System 2 (deliberative reasoning) 능력을 활용한 계층적 계획-실행 프레임워크를 제안한다.
저자: Songhao Han, Boxiang Qiu, Yue Liao, Siyuan Huang, Chen Gao, Shuicheng Yan, Si Liu | 날짜: 2025-06-07 | URL: https://arxiv.org/abs/2506.06677 📄 PDF
Figure 1: We shift the focus of robotic imitation learning from fast, reactive System 1 behavior to
RoboCerebra는 장기간 로봇 조작 작업 평가를 위한 대규모 벤치마크로, VLM의 System 2 (deliberative reasoning) 능력을 활용한 계층적 계획-실행 프레임워크를 제안한다.
Figure 1: We shift the focus of robotic imitation learning from fast, reactive System 1 behavior to
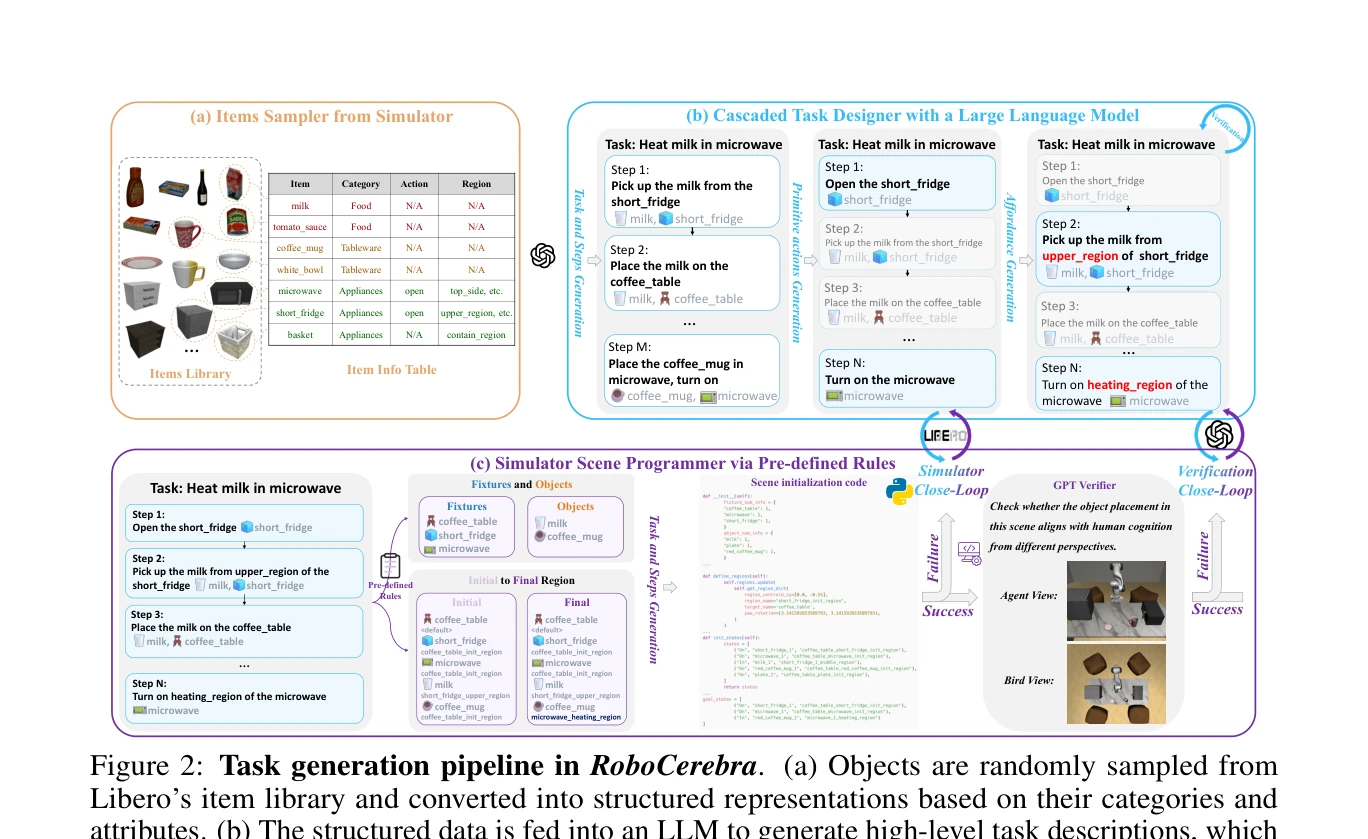
Figure 2: Task generation pipeline in RoboCerebra. (a) Objects are randomly sampled from
총평: RoboCerebra는 VLM의 System 2 능력을 평가하기 위한 첫 대규모 벤치마크로서, 기존 장기 로봇 조작 벤치마크의 한계를 명확히 지적하고 체계적인 데이터 및 평가 프로토콜을 제시한다. 다만 시뮬레이션 환경 제한과 실제 로봇 적용 검증 부재가 실용성 측면의 과제이다.