Essence
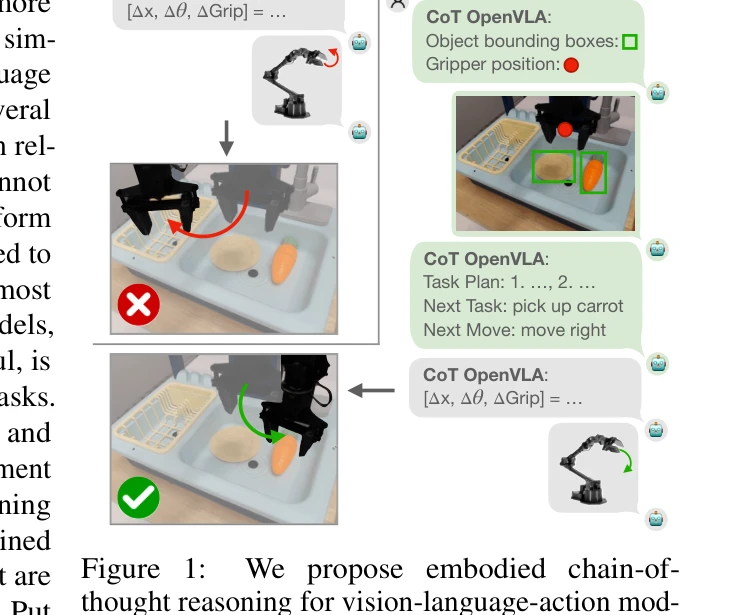
Figure 1:
Vision-language-action (VLA) 모델에 embodied chain-of-thought 추론을 도입하여 로봇 정책이 행동 예측 전에 계획, 부작업, 움직임, 시각적 특징에 대해 다단계 추론을 수행하도록 훈련시킨다. 합성 데이터 생성 파이프라인을 통해 OpenVLA의 절대 성공률을 28% 향상시켰다.
저자: Michał Zawalski, William Chen, Karl Pertsch, Oier Mees, Chelsea Finn, Sergey Levine | 날짜: 2024-07-11 | URL: https://arxiv.org/abs/2407.08693 📄 PDF
Figure 1:
Vision-language-action (VLA) 모델에 embodied chain-of-thought 추론을 도입하여 로봇 정책이 행동 예측 전에 계획, 부작업, 움직임, 시각적 특징에 대해 다단계 추론을 수행하도록 훈련시킨다. 합성 데이터 생성 파이프라인을 통해 OpenVLA의 절대 성공률을 28% 향상시켰다.
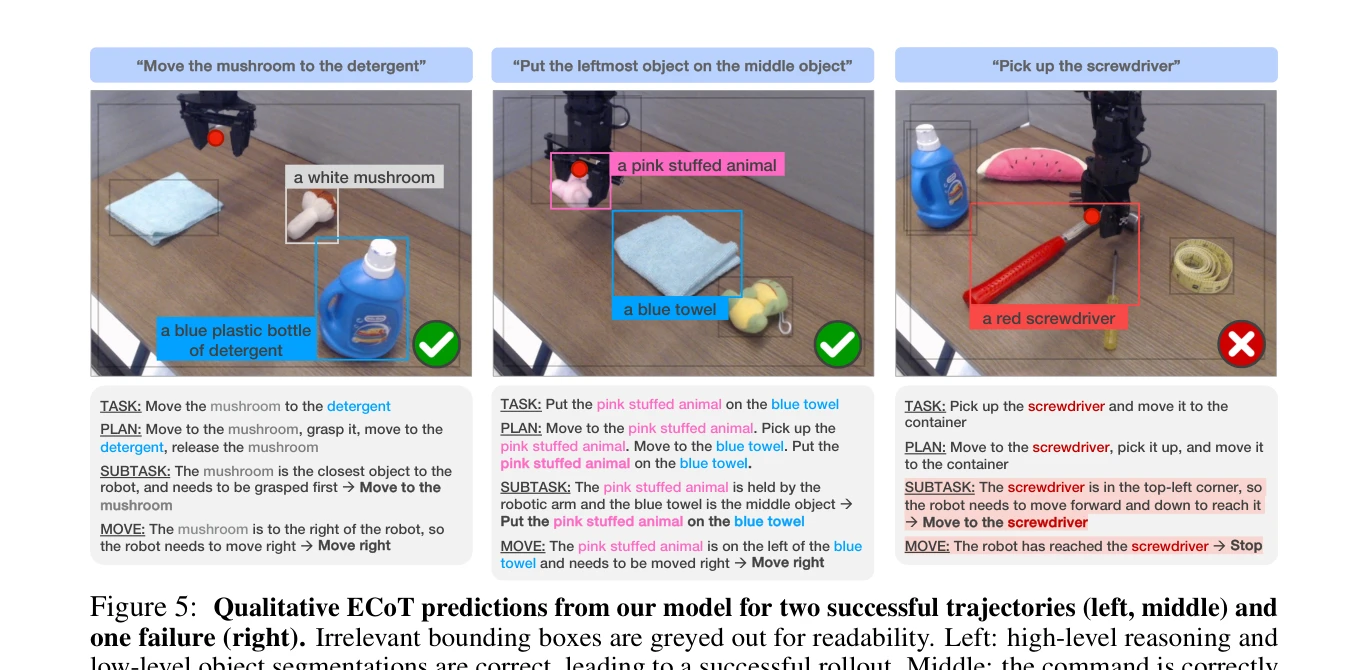
Figure 5: Qualitative ECoT predictions from our model for two successful trajectories (left, middle) and
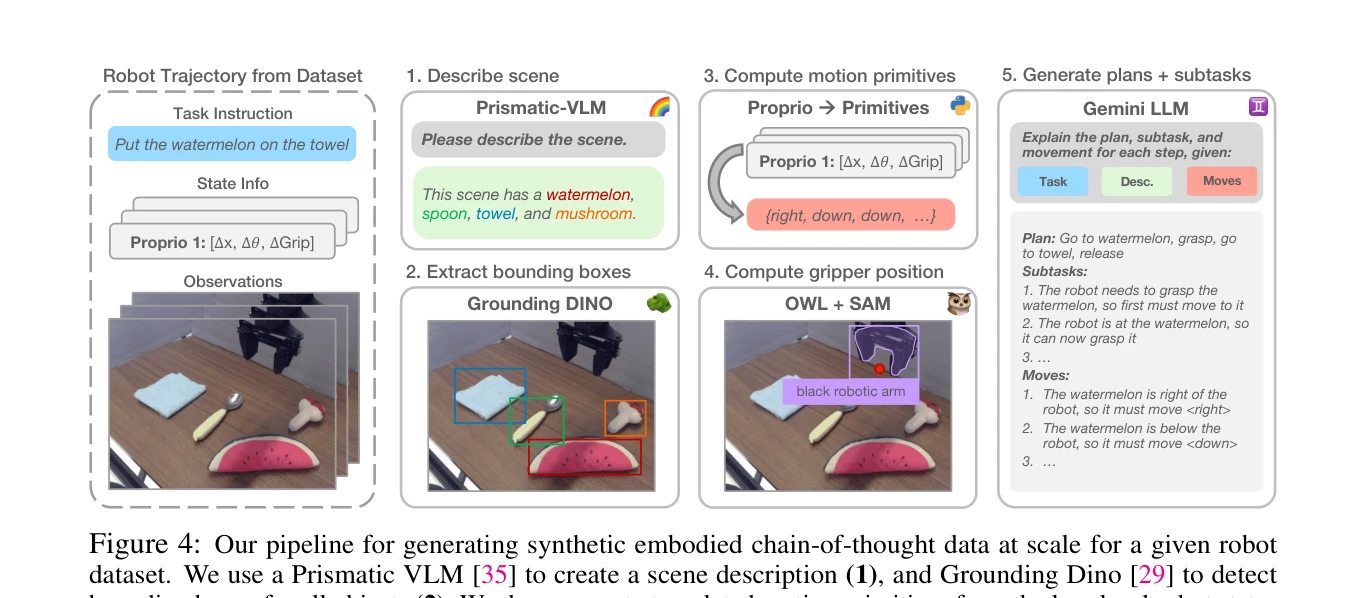
Figure 4: Our pipeline for generating synthetic embodied chain-of-thought data at scale for a given robot
총평: 이 논문은 로봇 제어에 chain-of-thought 추론을 창의적으로 적용하면서 시각적 근거화를 통해 실제 로봇 정책의 일반화를 현저히 개선했다. 합성 데이터 생성 파이프라인과 함께 해석 가능성 향상은 실제 로봇 응용에 큰 가치를 제공한다.