저자: Yiran Qin, Li Kang, Xiufeng Song, Zhenfei Yin, Xiaohong Liu, Xihui Liu, Ruimao Zhang, Lei Bai | 날짜: 2025-03-20 | URL: https://arxiv.org/abs/2503.16408 📄 PDF
Essence
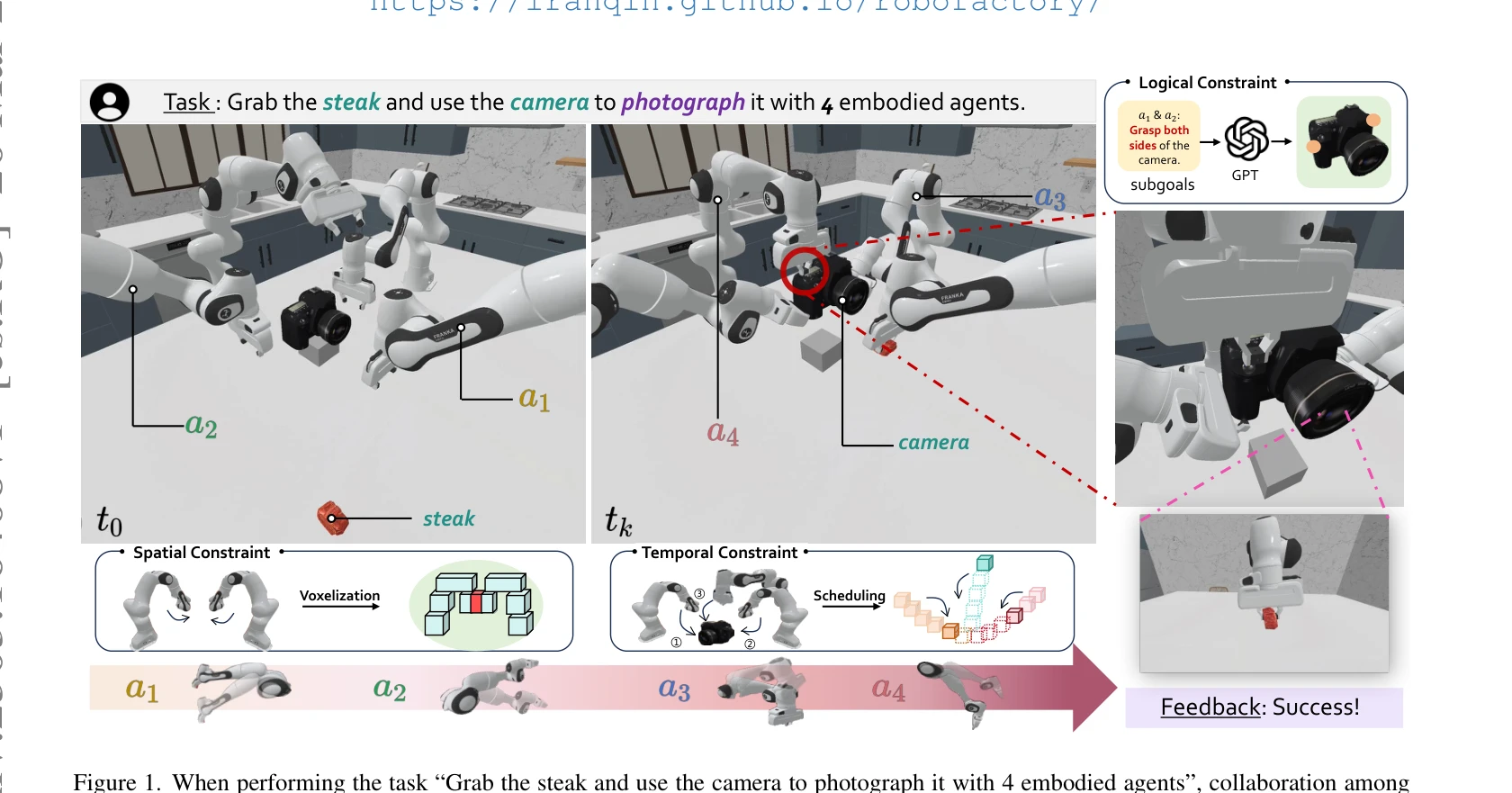
Figure 1. When performing the task “Grab the steak and use the camera to photograph it with 4 embodied agents”, collabor
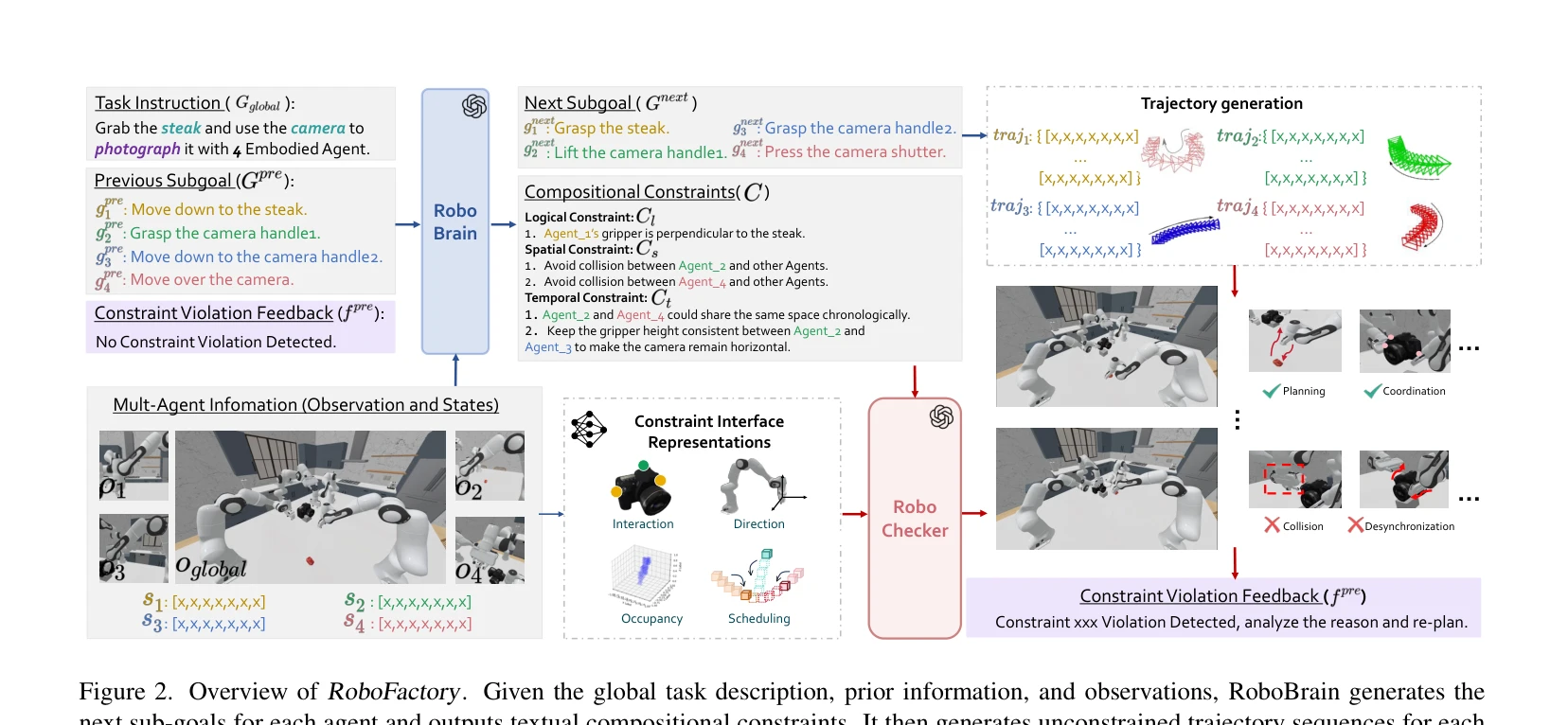
본 논문은 다중 구체화 에이전트(embodied multi-agent) 시스템의 협력을 위해 논리적, 공간적, 시간적 제약을 조합한 compositional constraints 개념을 제시하고, 이를 기반으로 자동화된 데이터 수집 프레임워크 RoboFactory를 개발하여 다중 에이전트 조작 벤치마크를 제공한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 본 논문은 다중 에이전트 로보틱 협력의 핵심 도전 문제를 compositional constraints로 우아하게 해결하고, 첫 번째 벤치마크를 제공함으로써 다중 에이전트 embodied AI 연구의 중요한 기초를 마련했다. 다만 실제 로봇 검증과 확장성 분석이 추가되면 더욱 강력한 기여가 될 것이다.