저자: Han Xue, Jieji Ren, Wendi Chen, Gu Zhang, Yuan Fang, Guoying Gu, Huazhe Xu, Cewu Lu | 날짜: 2025-03-04 | URL: https://arxiv.org/abs/2503.02881 📄 PDF
Essence
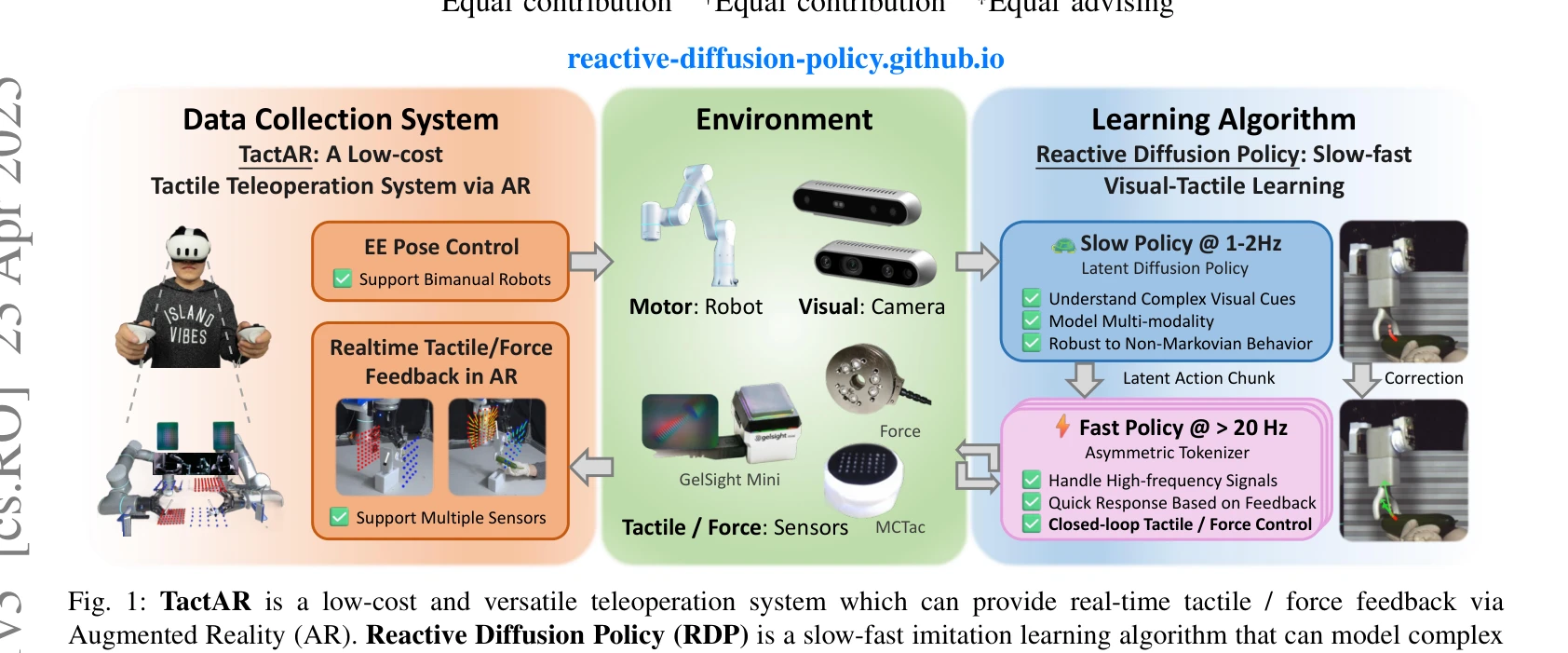
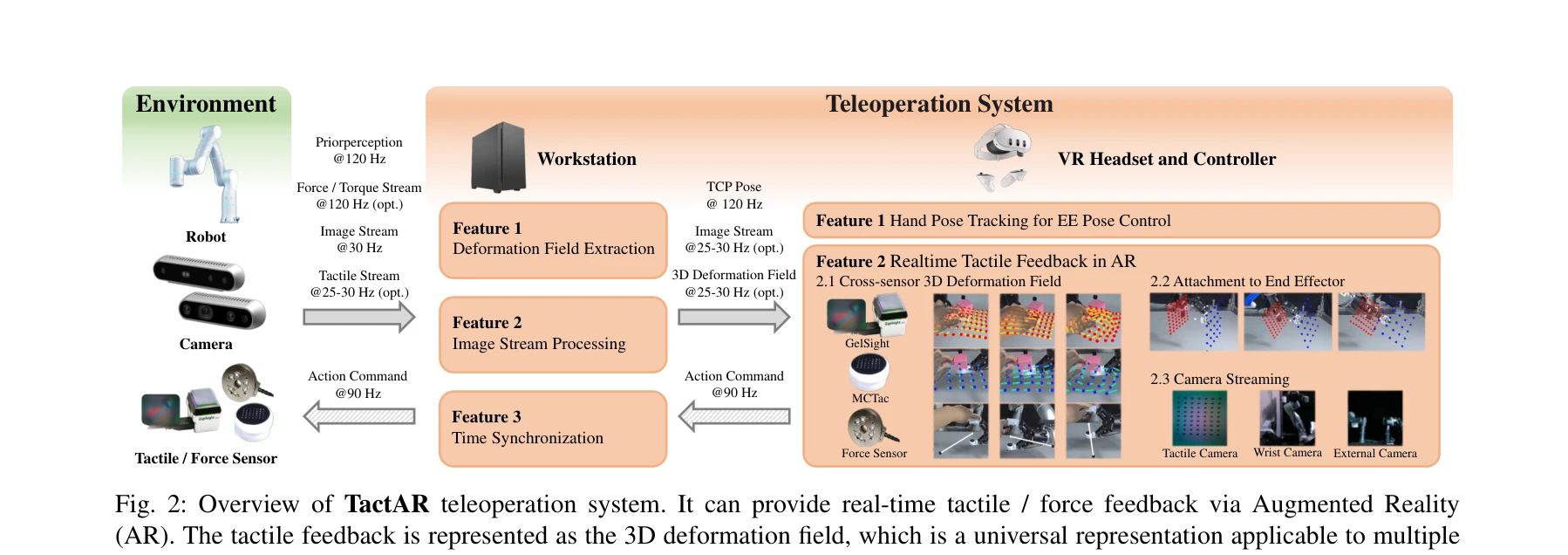
Fig. 1: TactAR is a low-cost and versatile teleoperation system which can provide real-time tactile / force feedback via
본 논문은 접촉 기반 조작 작업을 위해 AR 기반 촉각 피드백 텔레작동 시스템 TactAR과 slow-fast 계층 구조의 Reactive Diffusion Policy (RDP) 알고리즘을 제안하여, 고주파 촉각 피드백 기반 폐루프 제어와 복잡한 궤적 모델링을 통합한다.
Evaluation
Novelty: 4/5 Technical Soundness: 4/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 본 논문은 AR 기반 저비용 촉각 피드백 텔레작동 시스템과 slow-fast 계층 구조의 반응형 확산 정책을 제시하여 접촉 기반 조작에서 실시간 촉각 피드백 폐루프 제어와 복잡한 궤적 모델링을 효과적으로 통합하였으며, 광범위한 실험과 교차 센서 검증을 통해 로봇 조작 학습의 중요한 진전을 이루었다.