Essence
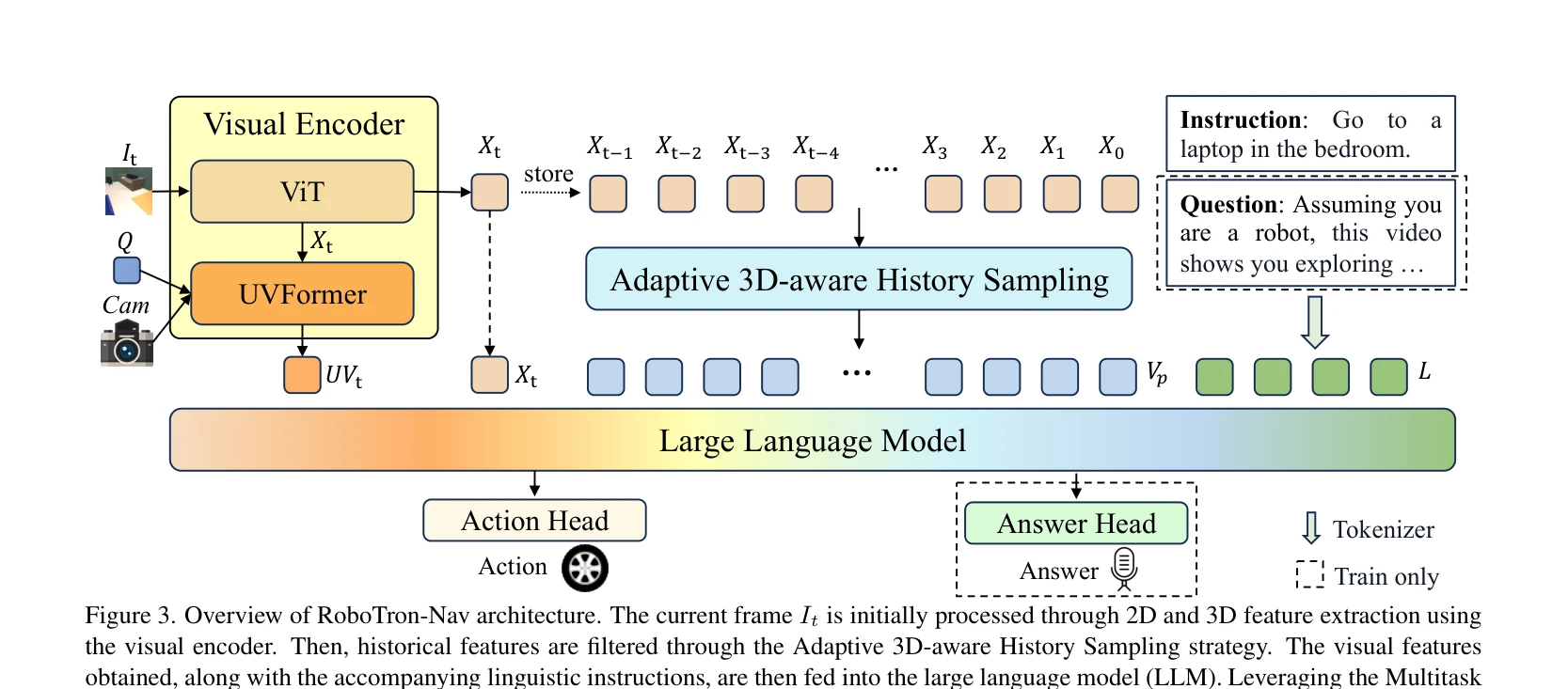
Figure 3. Overview of RoboTron-Nav architecture. The current frame It is initially processed through 2D and 3D feature e
RoboTron-Nav는 perception, planning, prediction을 통합하는 embodied navigation 프레임워크로, multitask collaboration (navigation + EQA)과 adaptive 3D-aware history sampling을 통해 언어 기반 시각 네비게이션 성능을 향상시킨다.