저자: Suhwan Choi, Yongjun Cho, Minchan Kim, Jaeyoon Jung, Myunchul Joe, Yubeen Park, Minseo Kim, Sungwoong Kim, Sungjae Lee, Hwiseong Park, Jiwan Chung, Youngjae Yu | 날짜: 2024-10-02 | URL: https://arxiv.org/abs/2410.01273 📄 PDF
Essence
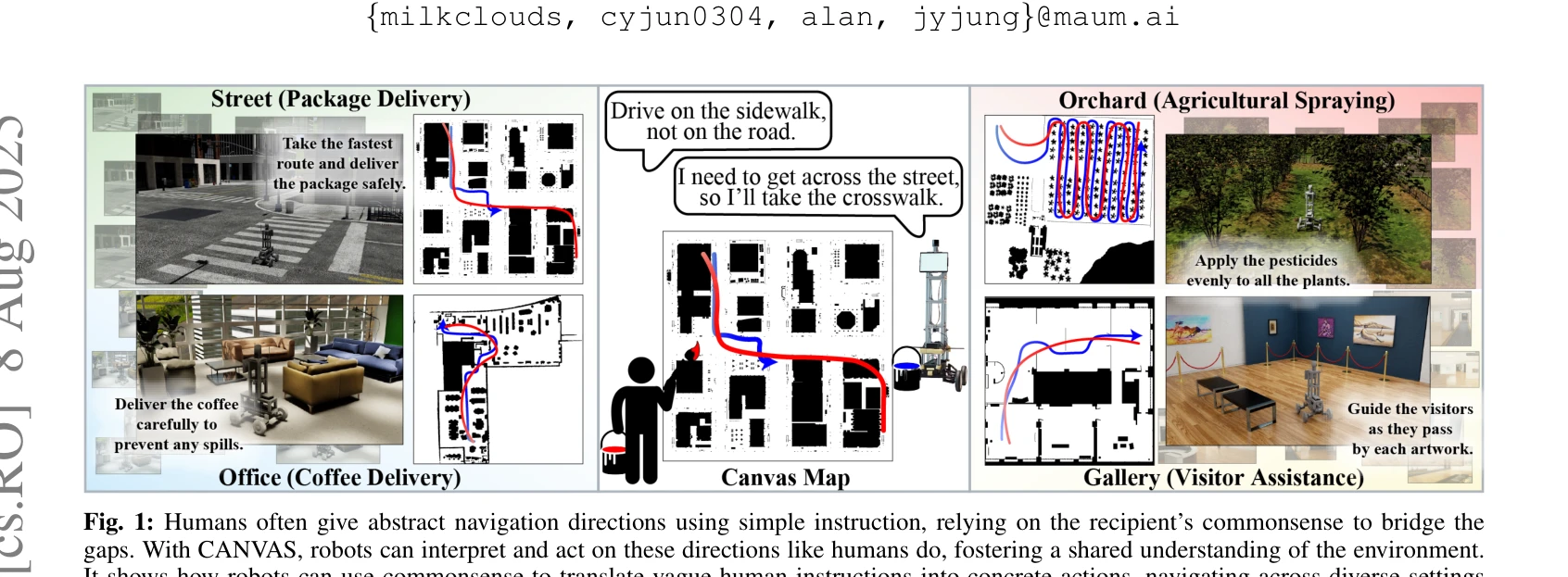
Fig. 1: Humans often give abstract navigation directions using simple instruction, relying on the recipient’s commonsens
CANVAS는 모호하거나 잡음이 있는 인간의 언어 및 시각적 지시(스케치, 텍스트)를 다중모드 입력으로 받아 상식적 이해를 바탕으로 로봇이 인간의 기대에 맞게 네비게이션을 수행하도록 하는 임베딩 러닝 기반 프레임워크이다.
Achievement
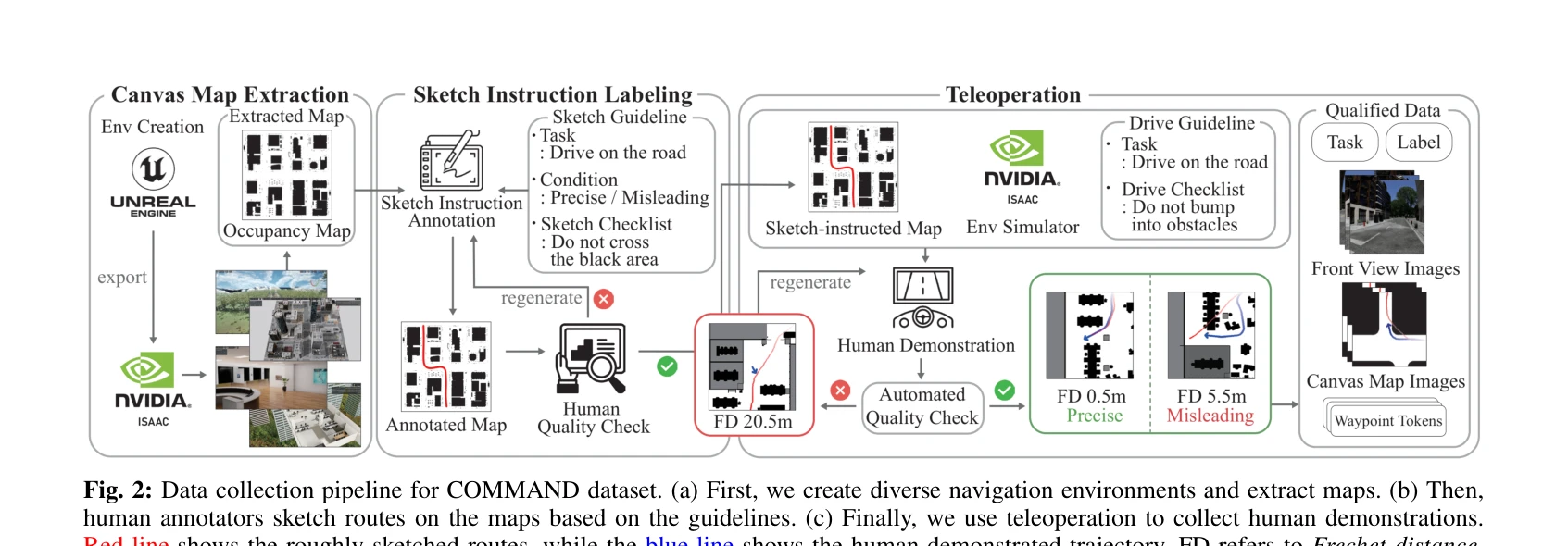
Fig. 2: Data collection pipeline for COMMAND dataset. (a) First, we create diverse navigation environments and extract m
ROS NavStack 대비 성능 우위: 모든 환경에서 ROS NavStack을 능가하며, 특히 과수원 환경에서 ROS NavStack이 0% 성공률을 기록할 때 67% 성공률 달성
대규모 고품질 데이터셋: COMMAND는 48시간의 주행 데이터로 GoStanford의 약 3배 규모이며 3개 환경(사무실, 거리, 과수원)에서 3,343개의 인간 주석 네비게이션 결과 제공
강력한 Sim2Real 전이: 시뮬레이션만으로 훈련되었으나 실제 로봇 배포에서 69% 성공률로 우수한 성능 입증
상식 제약 준수: 인간 시연과 유사한 궤적을 따르며 상식 제약 위반이 적음을 정량적으로 입증
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: CANVAS는 추상적이고 잡음이 있는 인간 지시를 상식 기반으로 해석하여 로봇 네비게이션을 수행하는 혁신적인 프레임워크이며, 대규모 COMMAND 데이터셋과 함께 강력한 성능(특히 어려운 환경에서 67% vs 0%), 그리고 우수한 Sim2Real 전이(69%)를 입증함으로써 인간-로봇 상호작용의 자연성 향상과 현실 적용 가능성을 효과적으로 제시한다.