Essence
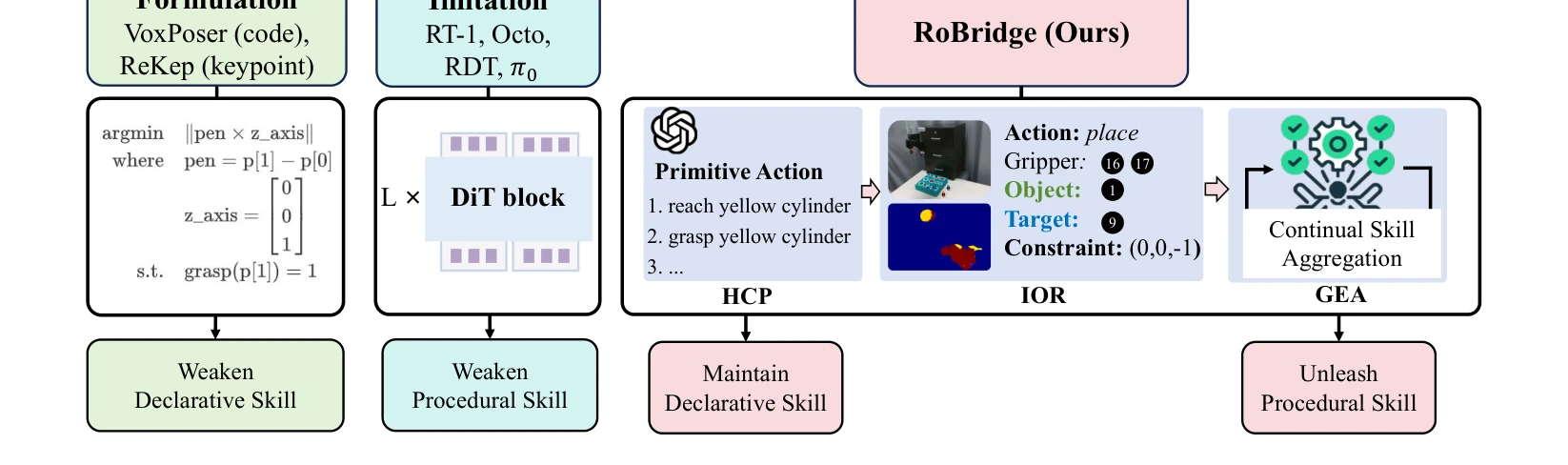
Figure 1. Comparison of RoBridge and previous methods. Declarative skill methods (left) directly generate specific contr
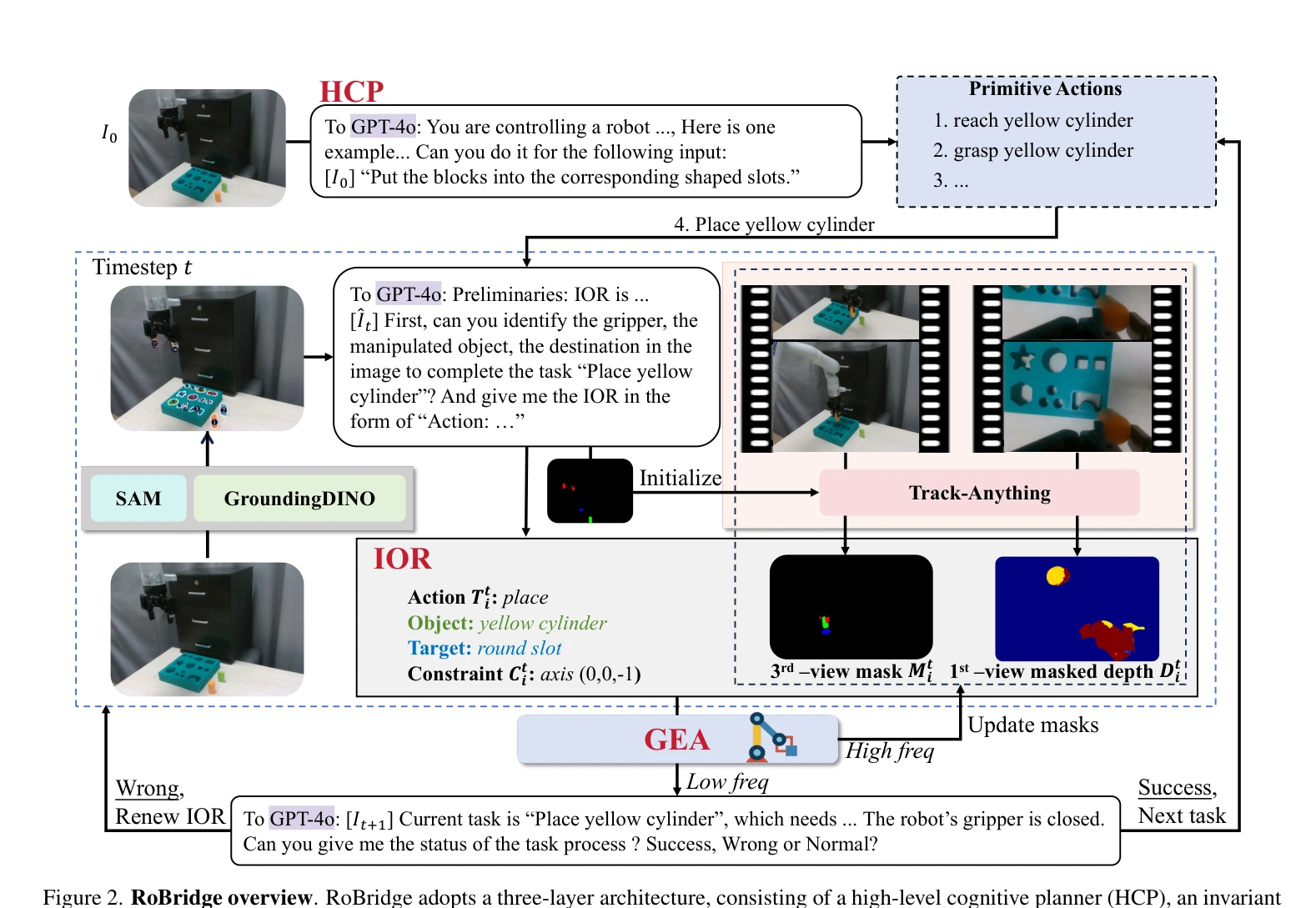
RoBridge는 Vision-Language Model의 선언적 능력과 강화학습의 절차적 능력을 통합하는 계층적 아키텍처로, Invariant Operable Representation(IOR)을 상징적 브릿지로 활용하여 로봇의 인지와 실행 간 격차를 해소한다.