Essence
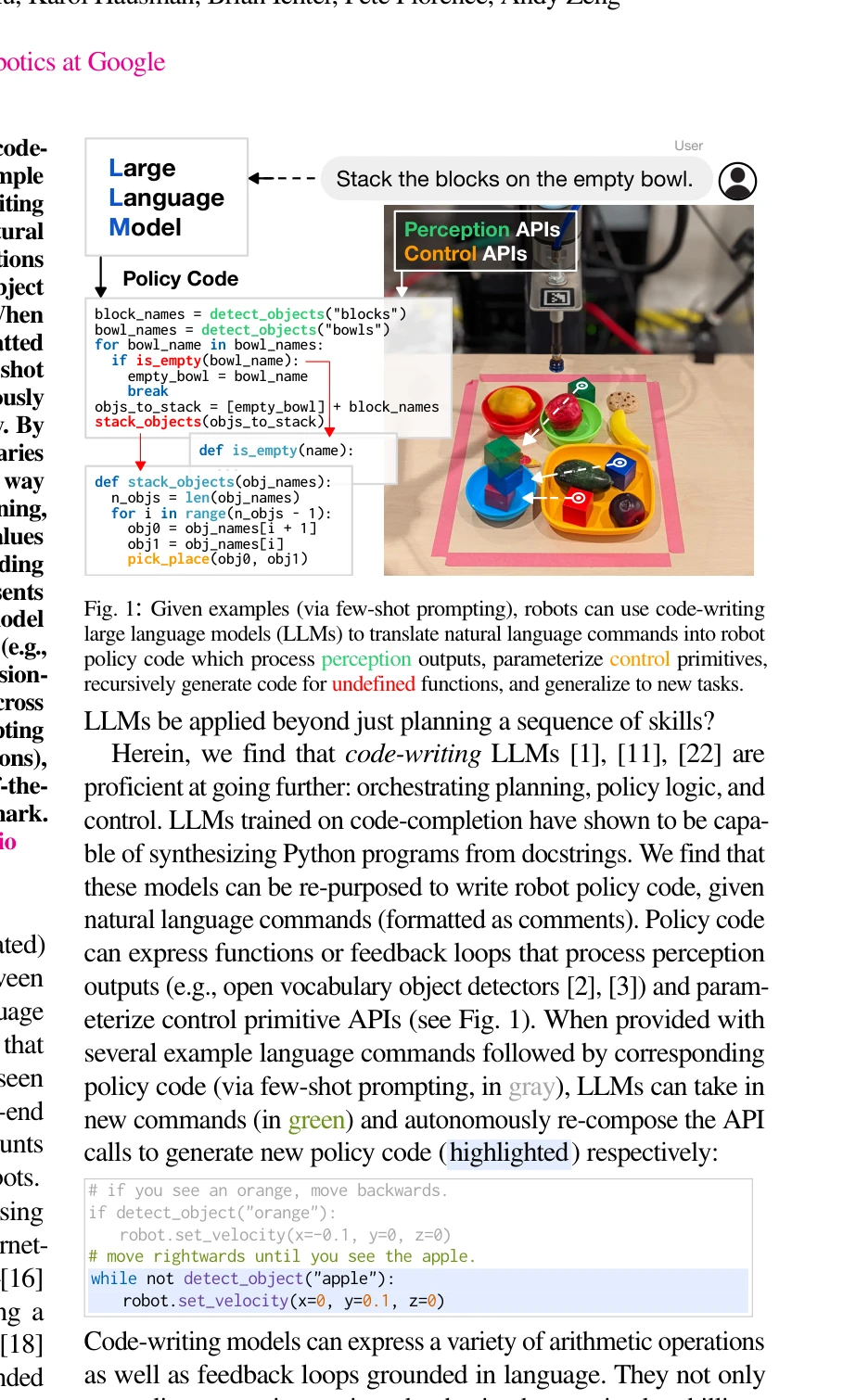
Fig. 1: Given examples (via few-shot prompting), robots can use code-writing
Large Language Model(LLM)을 활용하여 자연어 명령을 로봇 정책 코드로 직접 변환하는 "Code as Policies" 방식을 제안하며, few-shot prompting과 hierarchical code-gen을 통해 복잡한 로봇 행동을 실시간으로 생성한다.
저자: Jacky Liang, Wenlong Huang, Fei Xia, Peng Xu, Karol Hausman, Brian Ichter, Pete Florence, Andy Zeng | 날짜: 2022-09-16 | URL: https://arxiv.org/abs/2209.07753 📄 PDF
Fig. 1: Given examples (via few-shot prompting), robots can use code-writing
Large Language Model(LLM)을 활용하여 자연어 명령을 로봇 정책 코드로 직접 변환하는 "Code as Policies" 방식을 제안하며, few-shot prompting과 hierarchical code-gen을 통해 복잡한 로봇 행동을 실시간으로 생성한다.
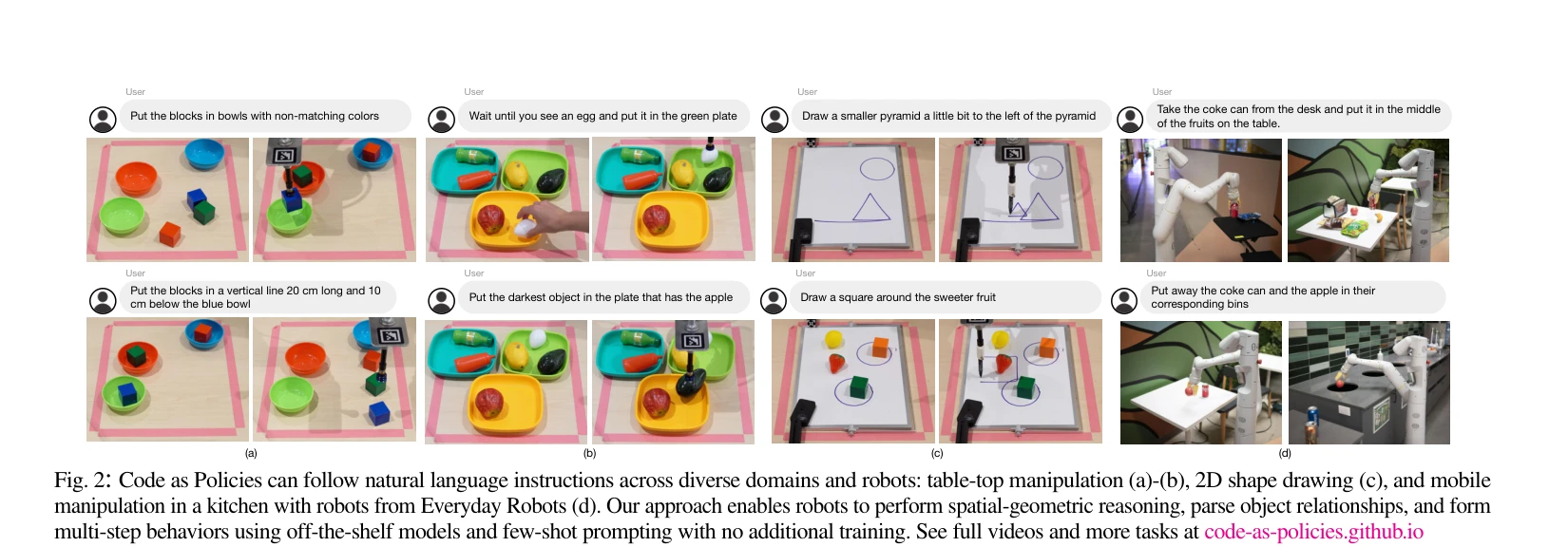
Fig. 2: Code as Policies can follow natural language instructions across diverse domains and robots: table-top manipulat
Fig. 1: Given examples (via few-shot prompting), robots can use code-writing
총평: 이 논문은 LLM을 로봇 정책 생성에 직접 적용하는 창의적인 방식을 제시하며, hierarchical code-gen을 통한 성능 개선과 다양한 실제 로봇 플랫폼에서의 검증으로 강한 임팩트를 가진다. 다만 생성 코드의 안정성 검증과 실시간 성능 평가가 보완되면 더욱 완성도 높은 연구가 될 것이다.