Essence
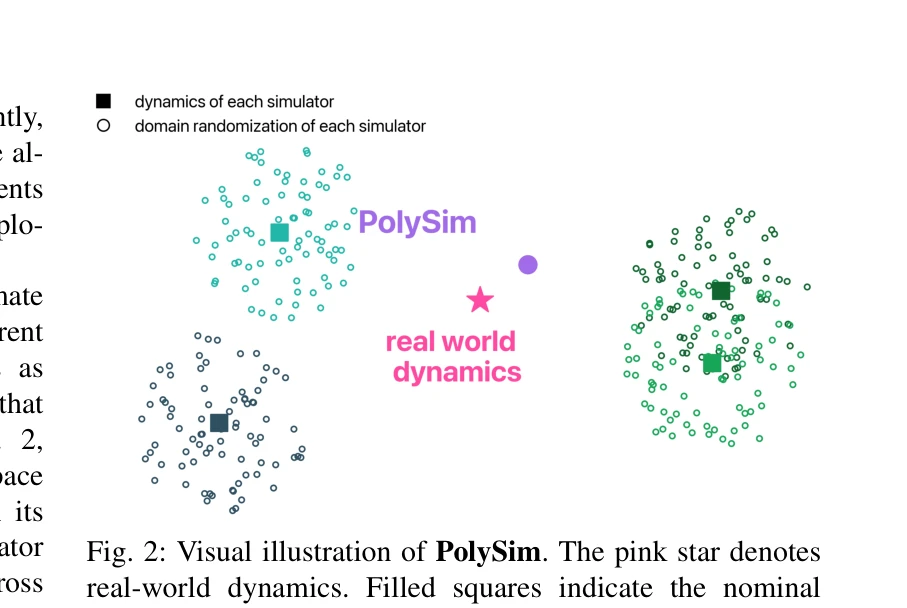
Fig. 2: Visual illustration of PolySim. The pink star denotes
PolySim은 여러 이질적인 시뮬레이터를 병렬로 활용하여 훈련하는 플랫폼으로, 단일 시뮬레이터의 귀납적 편향을 완화하고 현실 세계로의 전이 갭을 줄인다.
저자: Zixing Lei, Zibo Zhou, Sheng Yin, Yueru Chen, Qingyao Xu, Weixin Li, Yunhong Wang, Bowei Tang, Wei Jing, Siheng Chen | 날짜: 2025-10-02 | URL: https://arxiv.org/abs/2510.01708 📄 PDF
Fig. 2: Visual illustration of PolySim. The pink star denotes
PolySim은 여러 이질적인 시뮬레이터를 병렬로 활용하여 훈련하는 플랫폼으로, 단일 시뮬레이터의 귀납적 편향을 완화하고 현실 세계로의 전이 갭을 줄인다.
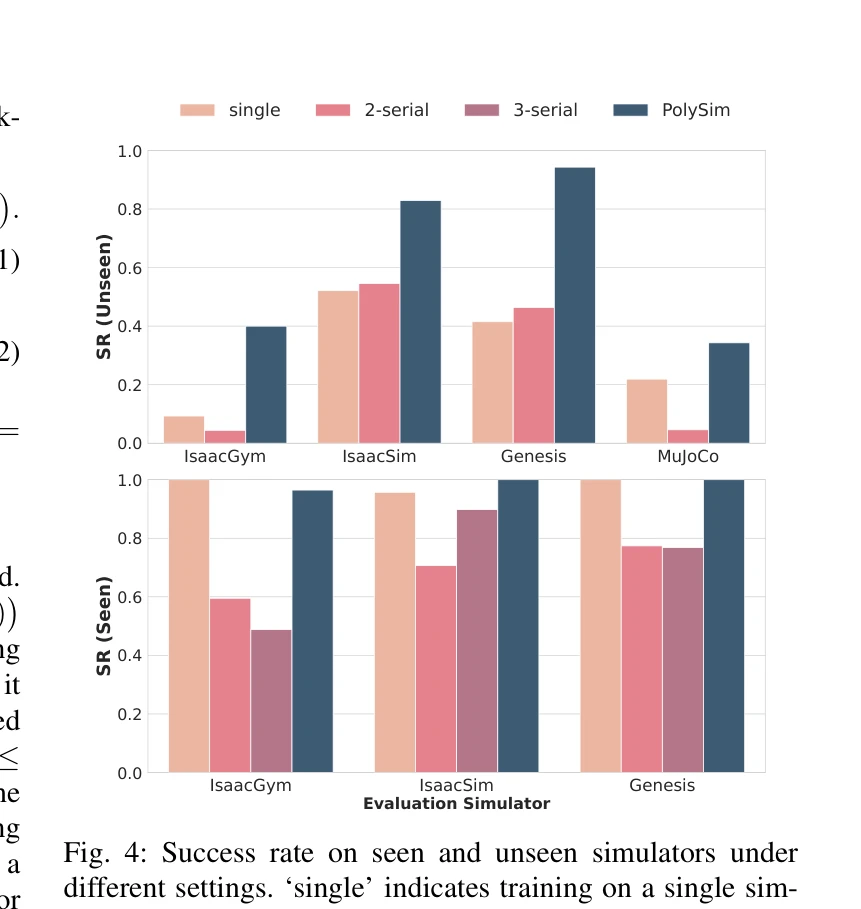
Fig. 4: Success rate on seen and unseen simulators under
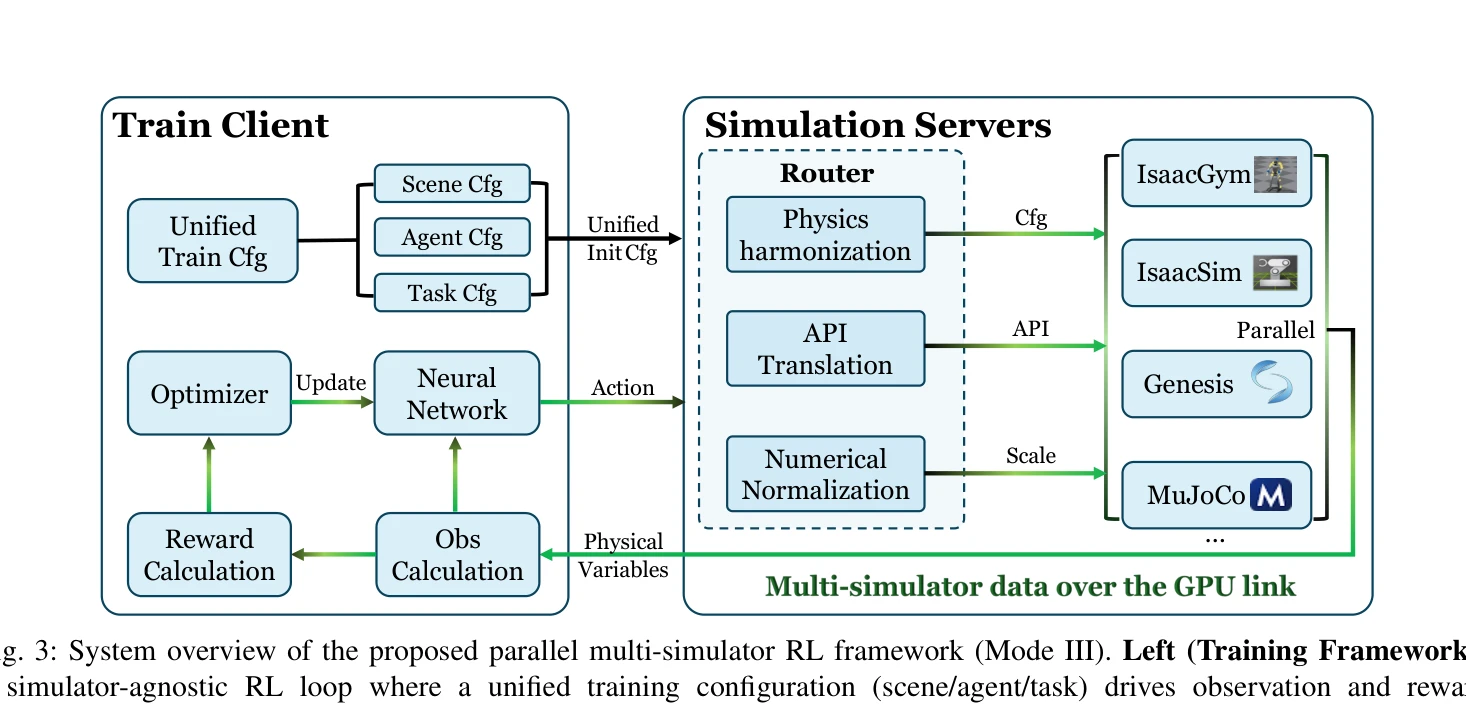
Fig. 3: System overview of the proposed parallel multi-simulator RL framework (Mode III). Left (Training Framework):
총평: PolySim은 다중 시뮬레이터 병렬 훈련을 통해 simulator inductive bias를 근본적으로 완화하는 혁신적 접근법이며, 견고한 이론적 근거와 실제 배포 성공으로 humanoid control의 현실 전이 문제 해결에 중요한 기여를 한다.