Essence
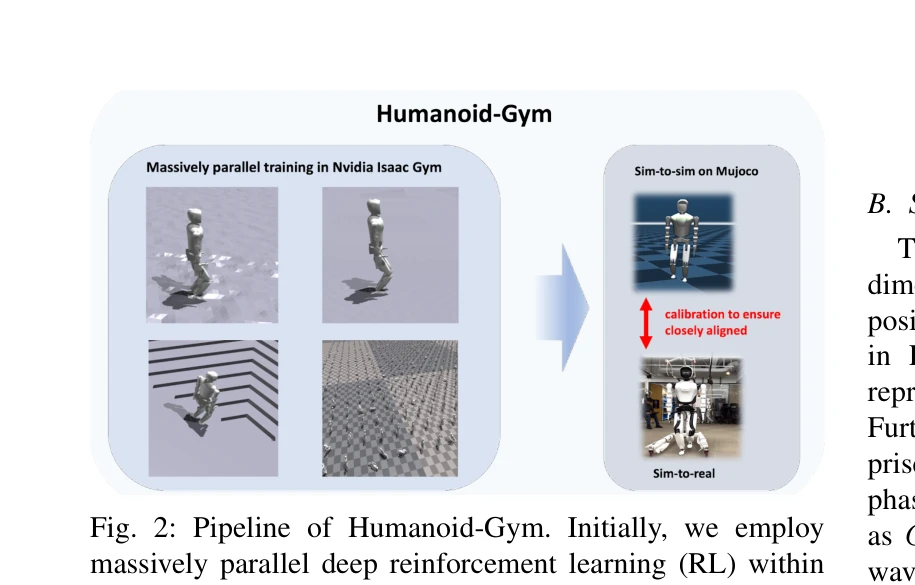
Fig. 2: Pipeline of Humanoid-Gym. Initially, we employ
Humanoid-Gym은 Nvidia Isaac Gym 기반의 강화학습 프레임워크로, 인간형 로봇의 보행 기술을 훈련하고 zero-shot sim-to-real 전이를 통해 실제 환경으로 직접 배포할 수 있도록 설계되었다.
저자: Xinyang Gu, Yen-Jen Wang, Jianyu Chen | 날짜: 2024-04-08 | URL: https://arxiv.org/abs/2404.05695 📄 PDF
Fig. 2: Pipeline of Humanoid-Gym. Initially, we employ
Humanoid-Gym은 Nvidia Isaac Gym 기반의 강화학습 프레임워크로, 인간형 로봇의 보행 기술을 훈련하고 zero-shot sim-to-real 전이를 통해 실제 환경으로 직접 배포할 수 있도록 설계되었다.
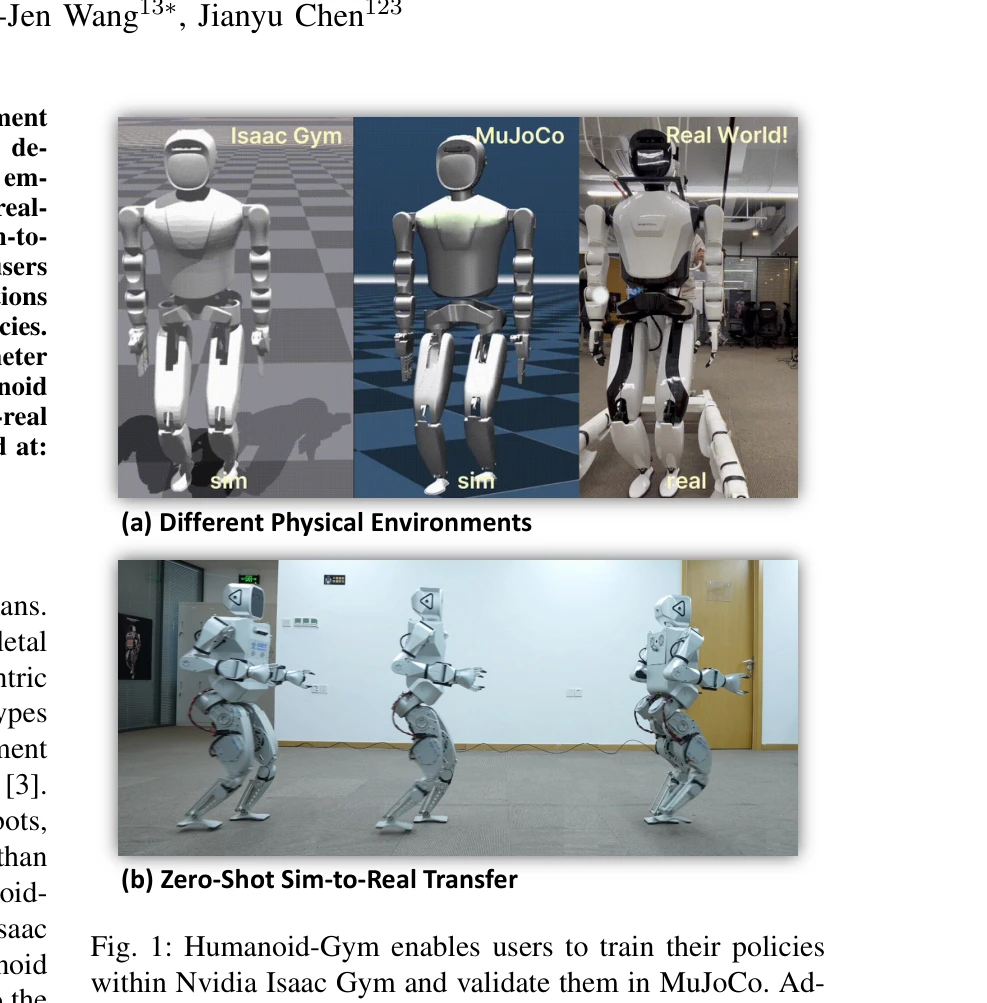
Fig. 1: Humanoid-Gym enables users to train their policies
Fig. 2: Pipeline of Humanoid-Gym. Initially, we employ
총평: Humanoid-Gym은 인간형 로봇의 zero-shot sim-to-real 전이를 체계적으로 구현한 최초의 공개 프레임워크로, 실제 로봇에서 입증된 높은 실용성과 함께 로봇 학습 커뮤니티에 중요한 기여를 제공한다. 다만 평가 환경과 로봇 종류의 다양성 확대를 통해 결과의 보편성을 강화할 필요가 있다.