Essence
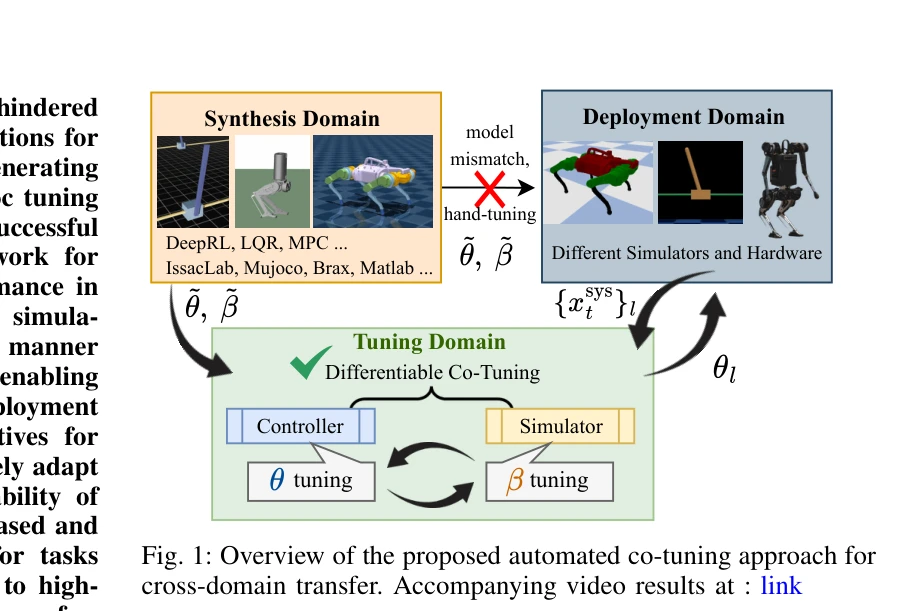
Fig. 1: Overview of the proposed automated co-tuning approach for
로봇 컨트롤러의 시뮬레이션-실제 환경 간 성능 격차를 해결하기 위해 differentiable simulator를 활용한 gradient 기반 co-tuning 프레임워크를 제안하며, 컨트롤러와 시뮬레이터 매개변수를 동시에 최적화하여 적은 시행횟수로 체계적인 도메인 전이를 가능하게 한다.
저자: Lokesh Krishna, Sheng Cheng, Junheng Li, Naira Hovakimyan, Quan Nguyen | 날짜: 2025-05-29 | URL: https://arxiv.org/abs/2505.24068 📄 PDF
Fig. 1: Overview of the proposed automated co-tuning approach for
로봇 컨트롤러의 시뮬레이션-실제 환경 간 성능 격차를 해결하기 위해 differentiable simulator를 활용한 gradient 기반 co-tuning 프레임워크를 제안하며, 컨트롤러와 시뮬레이터 매개변수를 동시에 최적화하여 적은 시행횟수로 체계적인 도메인 전이를 가능하게 한다.
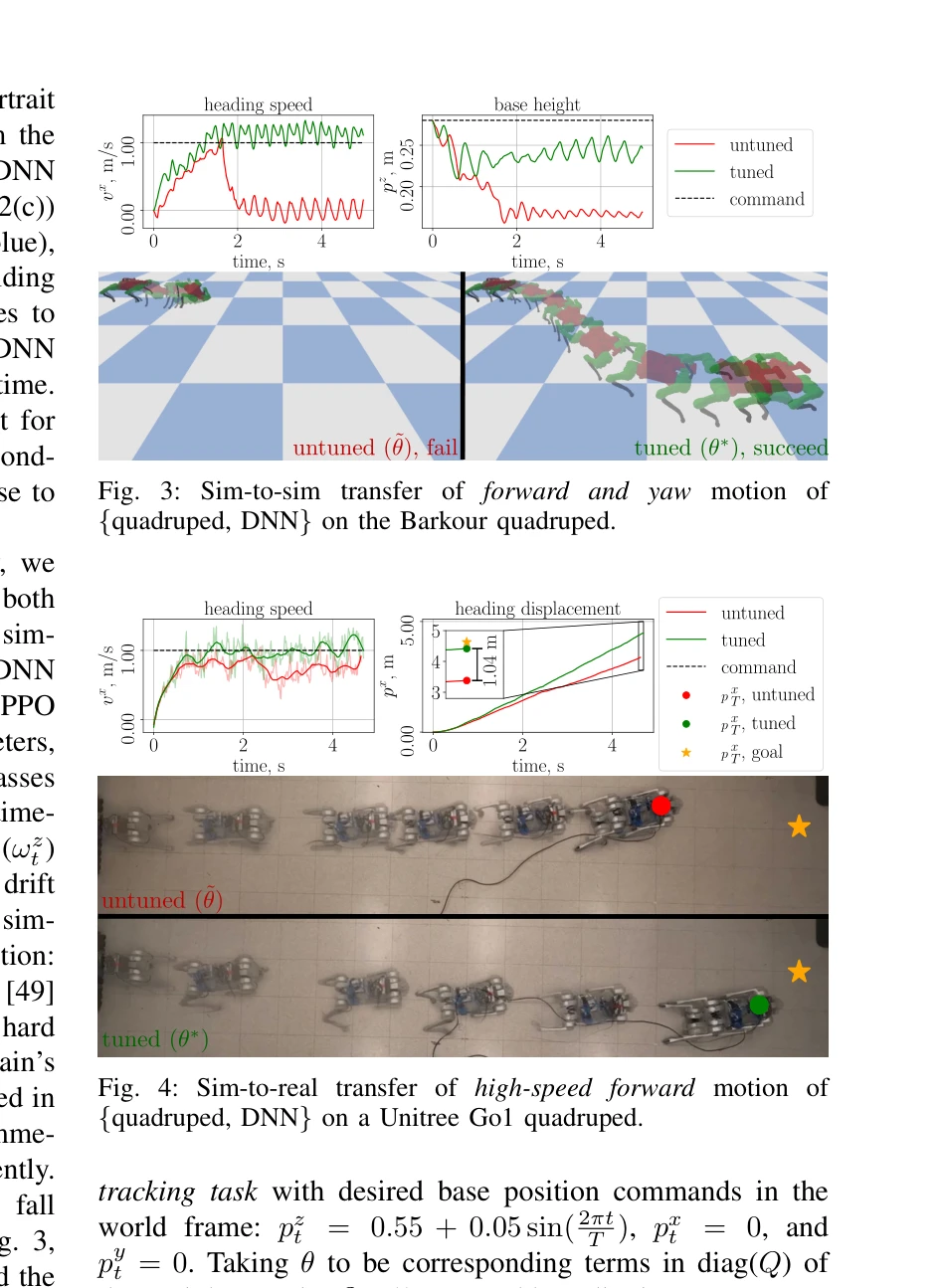
Fig. 3: Sim-to-sim transfer of forward and yaw motion of
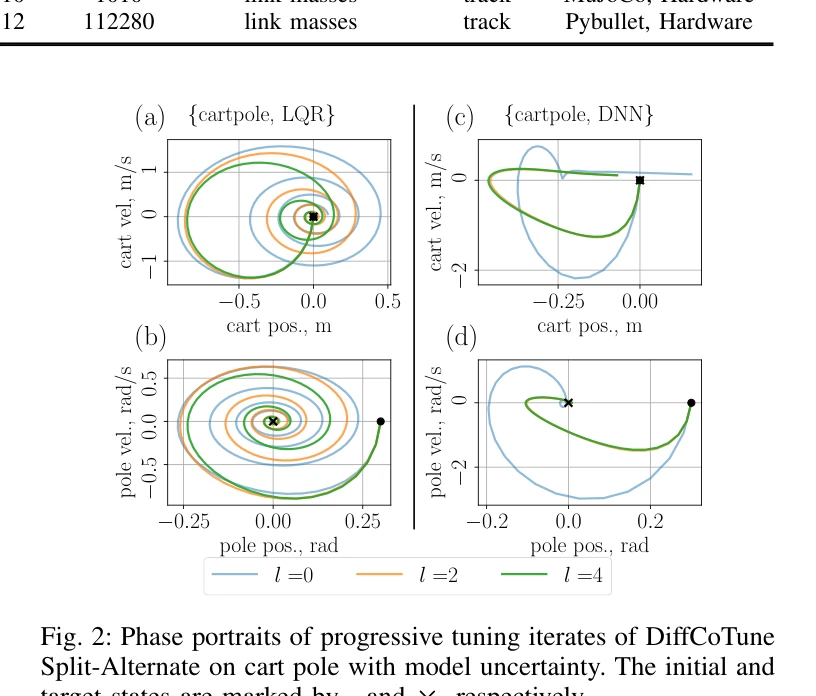
Fig. 2: Phase portraits of progressive tuning iterates of DiffCoTune
총평: 본 논문은 로봇 도메인 전이의 실질적 문제를 differentiable simulator 기반의 우아한 co-tuning 프레임워크로 해결하며, 다양한 컨트롤러와 시스템에서의 광범위한 실험을 통해 실용성을 입증한 기여도 높은 연구이다.