Essence
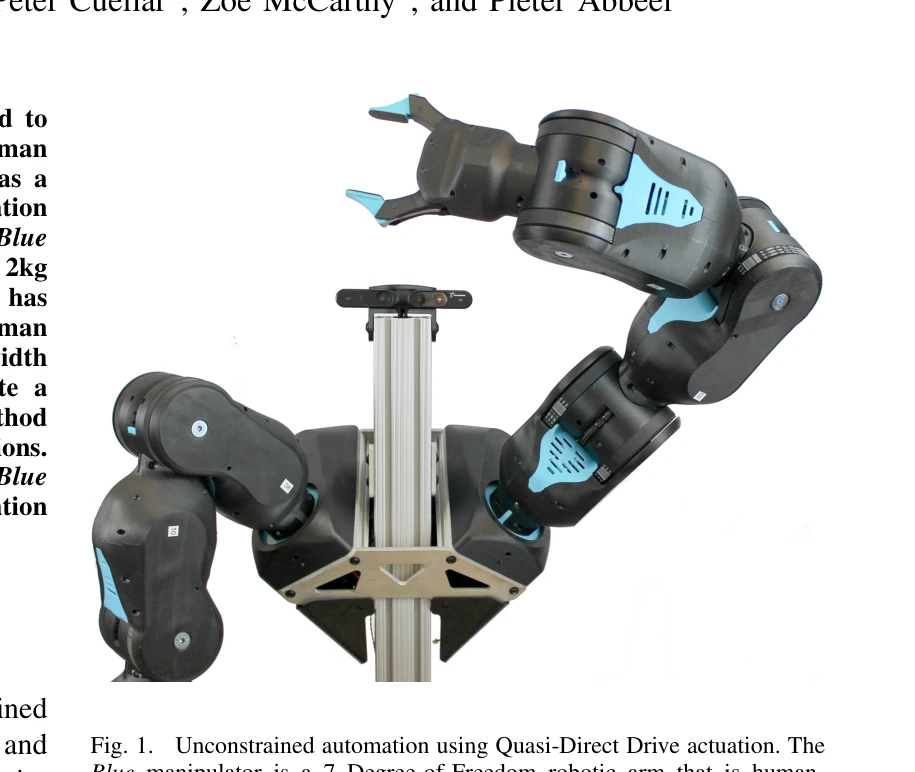
Fig. 1.
Quasi-Direct Drive 구동방식을 기반으로 한 저비용 7-DOF 로봇 팔 Blue를 제안하여 인간 환경에서 안전하고 힘 제어 가능한 조작을 가능하게 함.
저자: David V. Gealy, Stephen McKinley, Brent Yi, Philipp Wu, Phillip R. Downey, Greg Balke, Allan Zhao, Menglong Guo, Rachel Thomasson, Anthony Sinclair, Peter Cuellar, Zoe McCarthy, Pieter Abbeel | 날짜: 2019-04-08 | URL: https://arxiv.org/abs/1904.03815 📄 PDF
Fig. 1.
Quasi-Direct Drive 구동방식을 기반으로 한 저비용 7-DOF 로봇 팔 Blue를 제안하여 인간 환경에서 안전하고 힘 제어 가능한 조작을 가능하게 함.
Fig. 1.
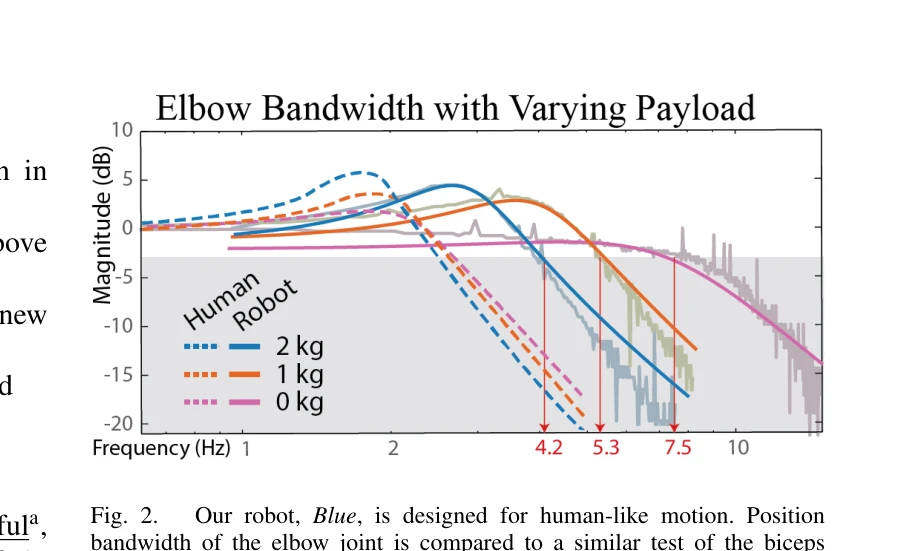
Fig. 2.
총평: 이 논문은 인간 환경에서 필요한 저비용 compliant 로봇의 설계 패러다임을 재정의하고 Quasi-Direct Drive 방식을 통해 이를 실현한 획기적 연구로, AI 기반 로봇 학습의 대규모 보급을 가능하게 하는 중요한 플랫폼을 제시함.