Essence
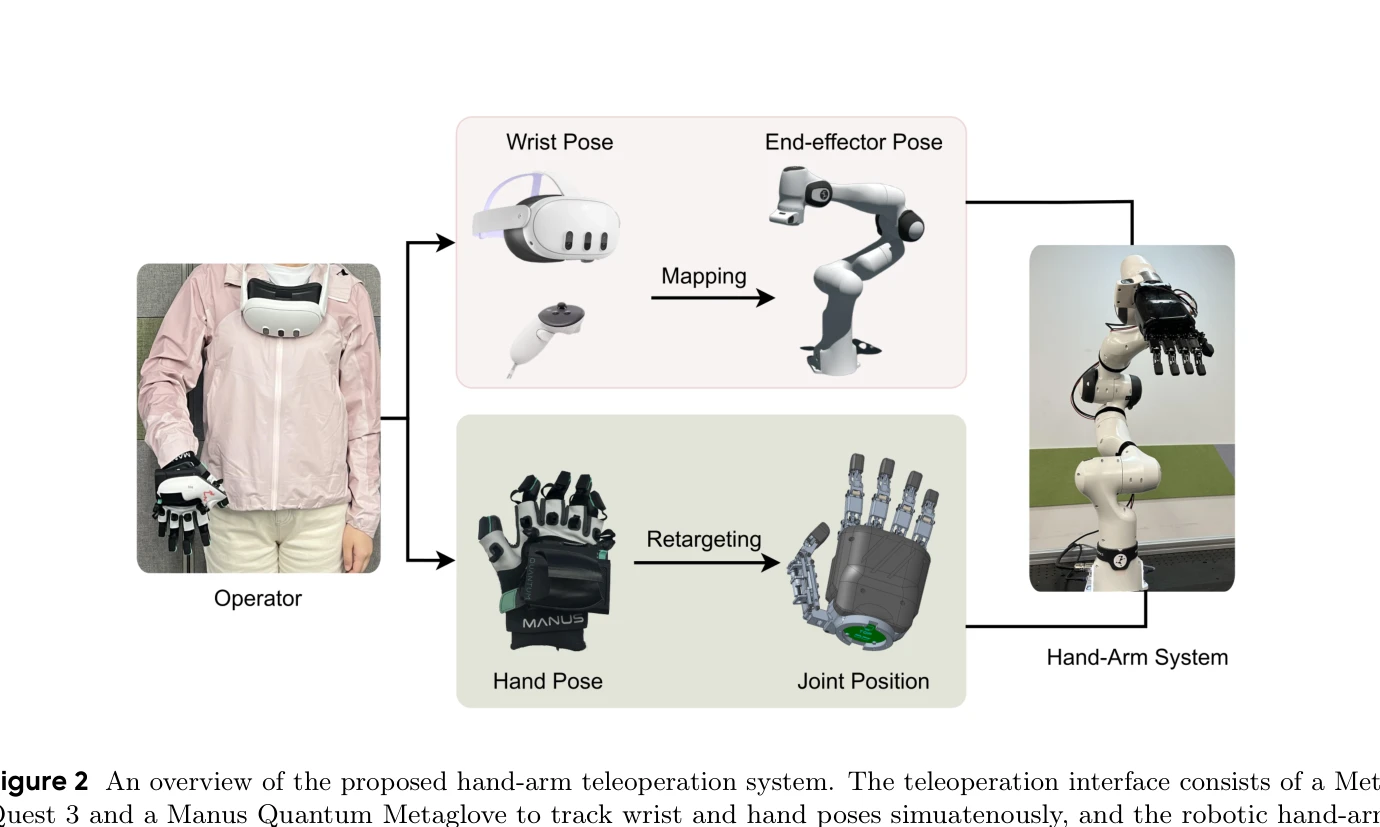
Figure 2 An overview of the proposed hand-arm teleoperation system. The teleoperation interface consists of a Meta
ByteDexter라는 20-DoF 링크구동 로봇 손과 optimization 기반 motion retargeting을 이용하여 인간의 손 움직임을 실시간으로 로봇에 재현하는 원격조종 시스템을 제시한다.
저자: Ruoshi Wen, Jiajun Zhang, Guangzeng Chen, Zhongren Cui, Min Du, Yang Gou, Zhigang Han, Junkai Hu, Liqun Huang, Hao Niu, Wei Xu, Haoxiang Zhang, Zhengming Zhu, Hang Li, Zeyu Ren | 날짜: 2025-07-04 | URL: https://arxiv.org/abs/2507.03227 📄 PDF
Figure 2 An overview of the proposed hand-arm teleoperation system. The teleoperation interface consists of a Meta
ByteDexter라는 20-DoF 링크구동 로봇 손과 optimization 기반 motion retargeting을 이용하여 인간의 손 움직임을 실시간으로 로봇에 재현하는 원격조종 시스템을 제시한다.
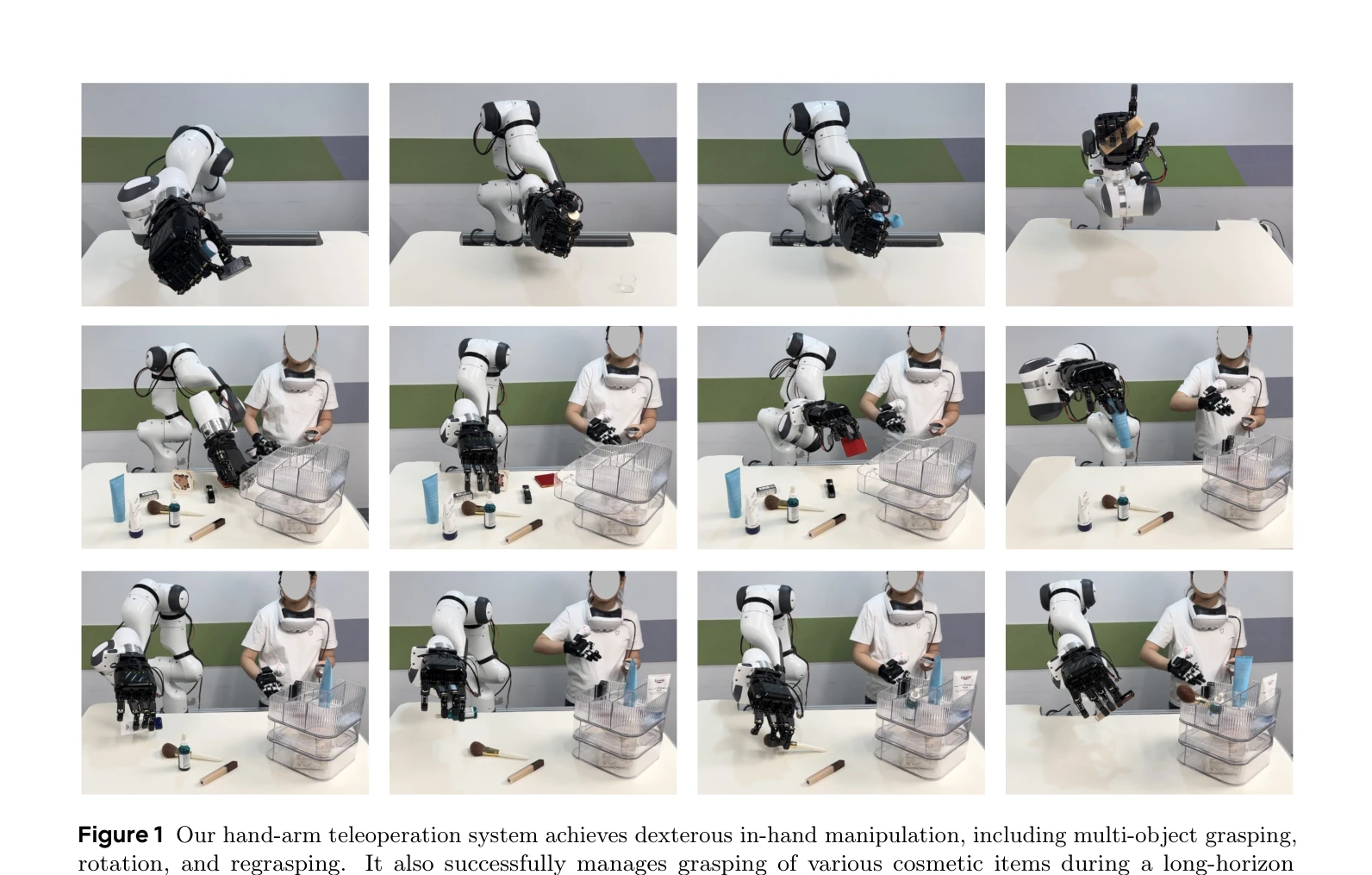
Figure 1 Our hand-arm teleoperation system achieves dexterous in-hand manipulation, including multi-object grasping,
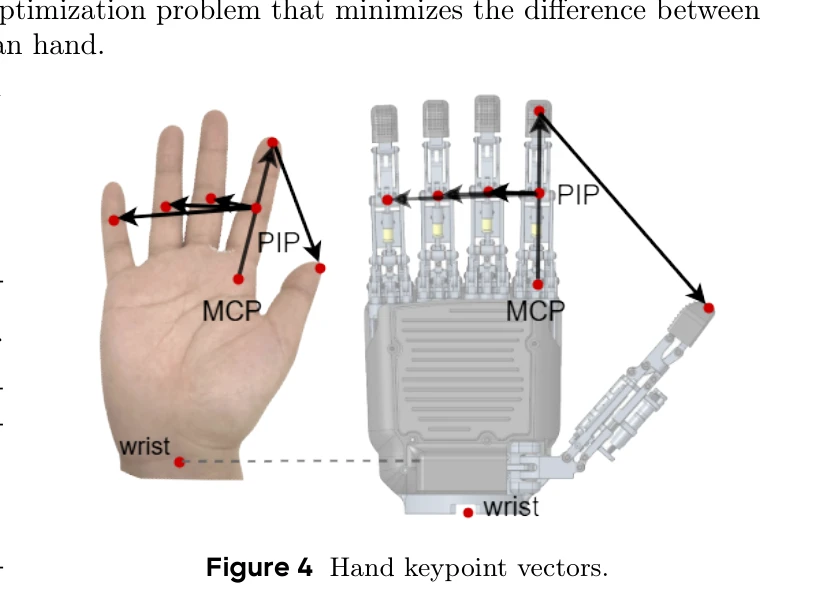
Figure 4 Hand keypoint vectors.
총평: ByteDexter 시스템은 linkage-driven 손의 mechanical design, fast kinematics solver, 그리고 optimization 기반 motion retargeting을 정교하게 통합하여 고-DoF 로봇 손의 원격조종을 실현하는 의미 있는 기여를 제시한다. 실시간 제어와 고품질 demonstration data 생성이라는 실용적 가치가 높지만, 다양한 task 환경에서의 general robustness와 imitation learning 결과의 실증이 필요하다.