Essence
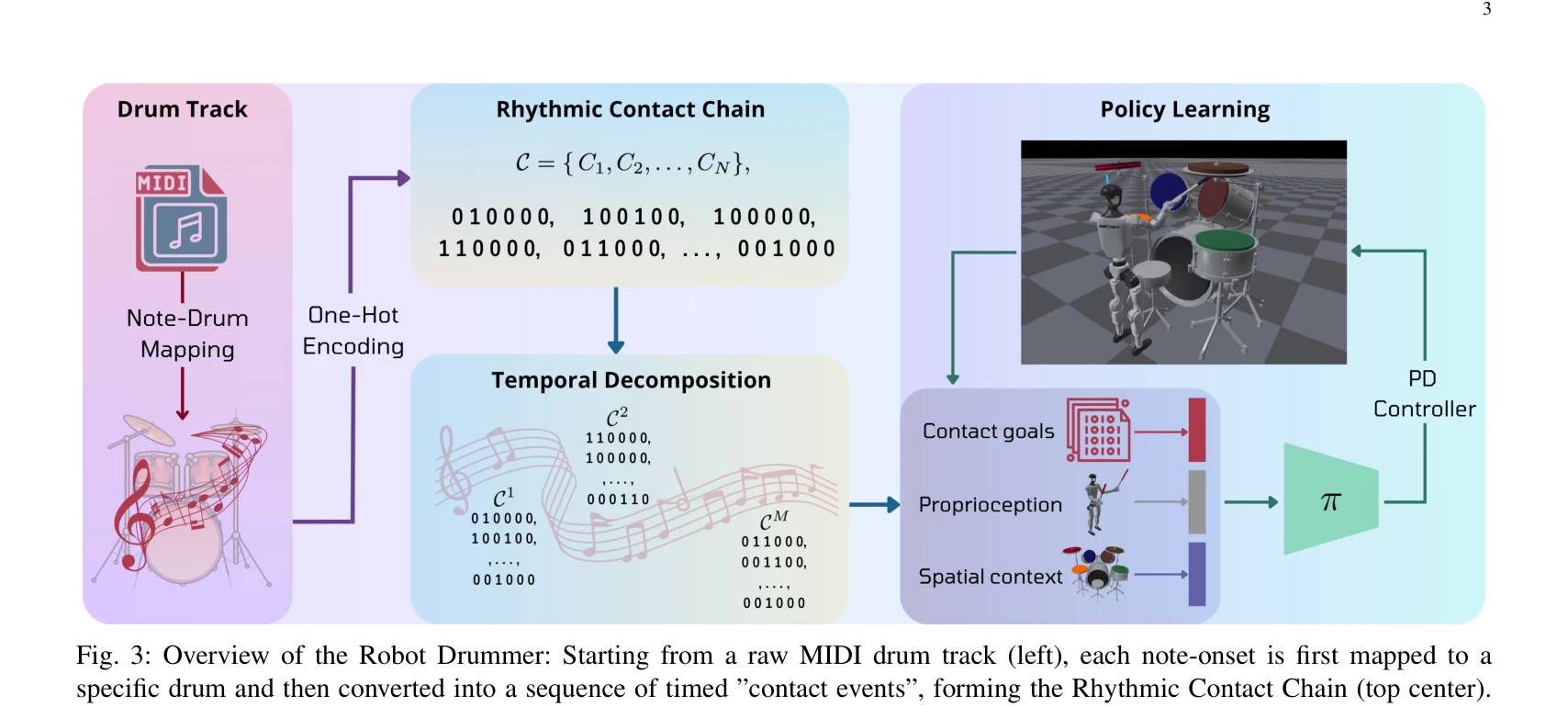
Fig. 3: Overview of the Robot Drummer: Starting from a raw MIDI drum track (left), each note-onset is first mapped to a
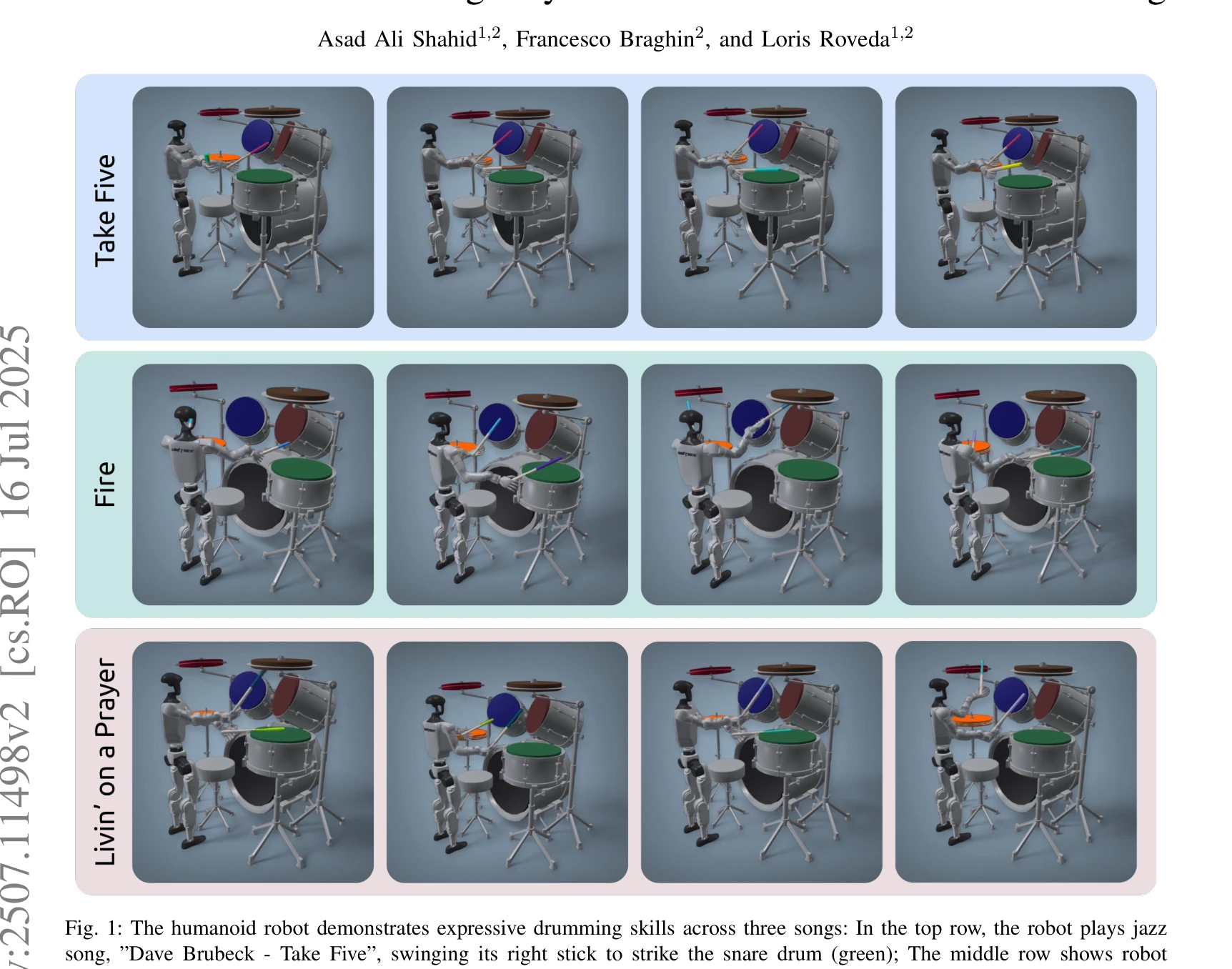
본 논문은 인문형 로봇이 MIDI 악보를 기반으로 드럼을 연주하는 기술을 제시하며, Rhythmic Contact Chain 표현과 temporal decomposition을 활용한 reinforcement learning 프레임워크를 제안한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 본 논문은 humanoid robotics에서 process-driven 창의적 작업으로의 확장을 의미 있게 시연하며, Rhythmic Contact Chain과 temporal decomposition이라는 실용적 기법을 통해 장시간 정밀 제어 문제를 효과적으로 해결한다. 30개 이상의 곡에서의 성공적 성과와 신흥 인간형 전략의 발현은 RL 기반 로봇 제어의 창의적 응용 가능성을 강력하게 보여준다.