Essence
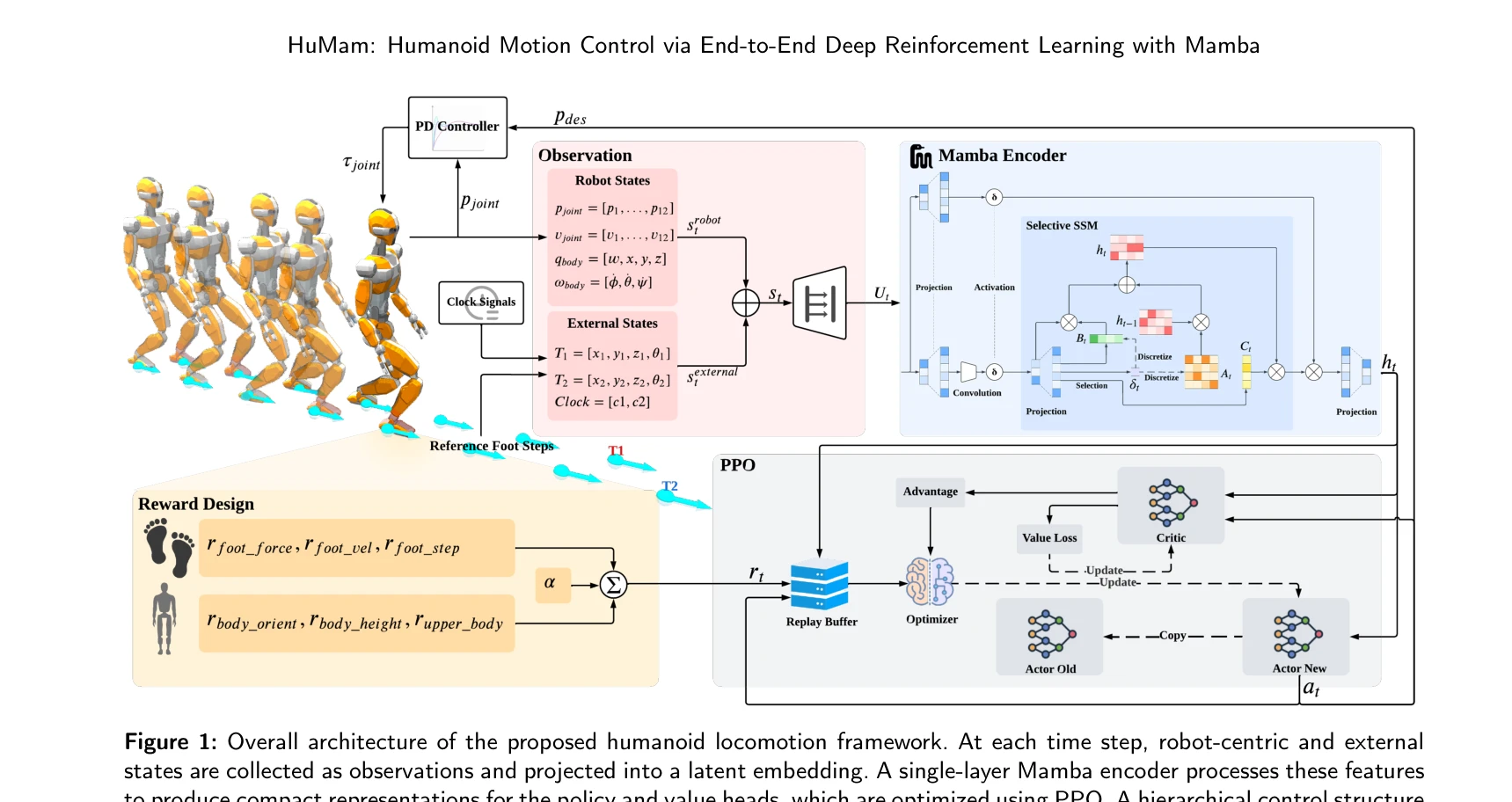
Figure 1: Overall architecture of the proposed humanoid locomotion framework. At each time step, robot-centric and exter
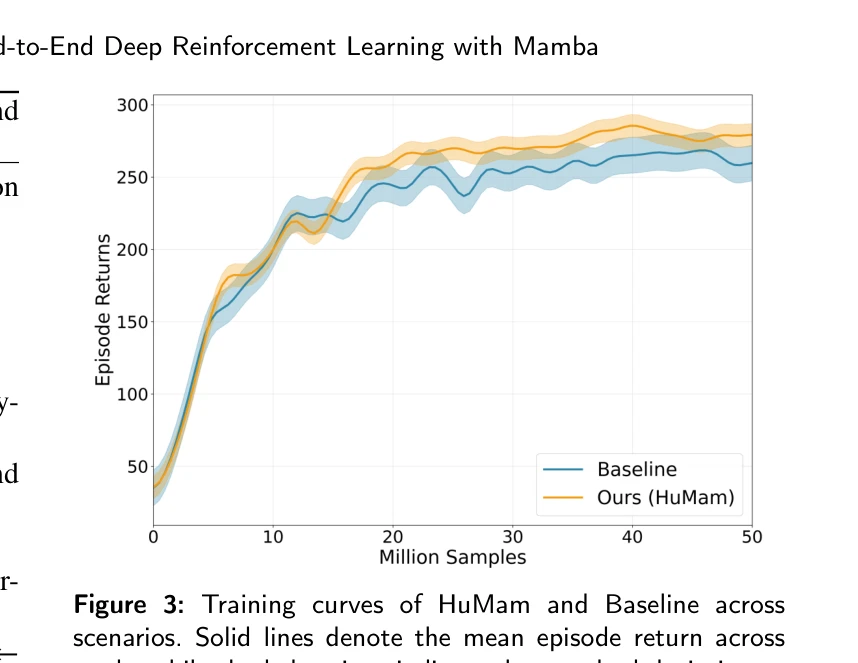
HuMam은 Mamba 인코더를 백본으로 사용하는 end-to-end 강화학습 기반 휴머노이드 로봇 보행 제어 프레임워크로, 로봇 중심 상태와 목표 발걸음을 효율적으로 융합하여 안정적이고 에너지 효율적인 제어를 실현한다.