Essence
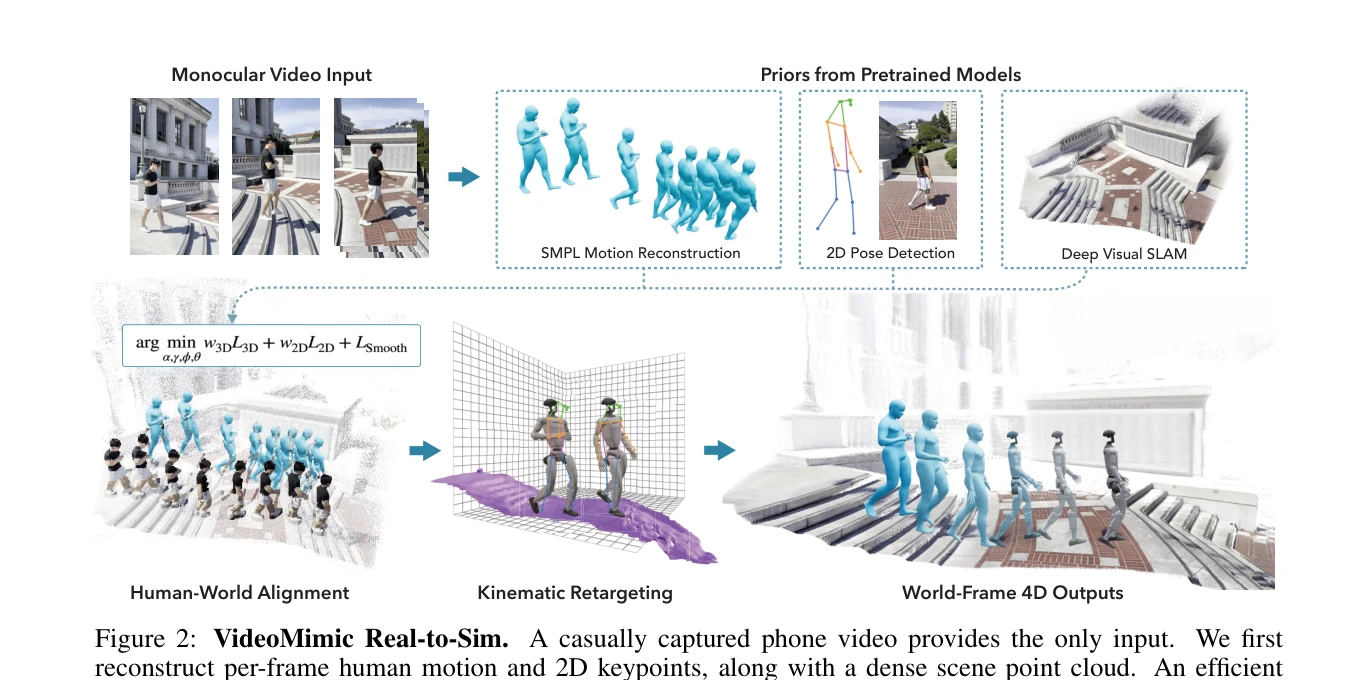
Figure 2: VideoMimic Real-to-Sim. A casually captured phone video provides the only input. We first
VIDEOMIMIC는 단순한 휴대폰 영상에서 인간-환경 4D 기하학을 공동 재구성하고, 이를 시뮬레이션에서 RL 정책으로 학습한 후 실제 휴머노이드 로봇에 배포하는 real-to-sim-to-real 파이프라인이다.
저자: Arthur Allshire, Hongsuk Choi, Junyi Zhang, David McAllister, Anthony Zhang, Chung Min Kim, Trevor Darrell, Pieter Abbeel, Jitendra Malik, Angjoo Kanazawa | 날짜: 2025-05-06 | URL: https://arxiv.org/abs/2505.03729 📄 PDF
Figure 2: VideoMimic Real-to-Sim. A casually captured phone video provides the only input. We first
VIDEOMIMIC는 단순한 휴대폰 영상에서 인간-환경 4D 기하학을 공동 재구성하고, 이를 시뮬레이션에서 RL 정책으로 학습한 후 실제 휴머노이드 로봇에 배포하는 real-to-sim-to-real 파이프라인이다.
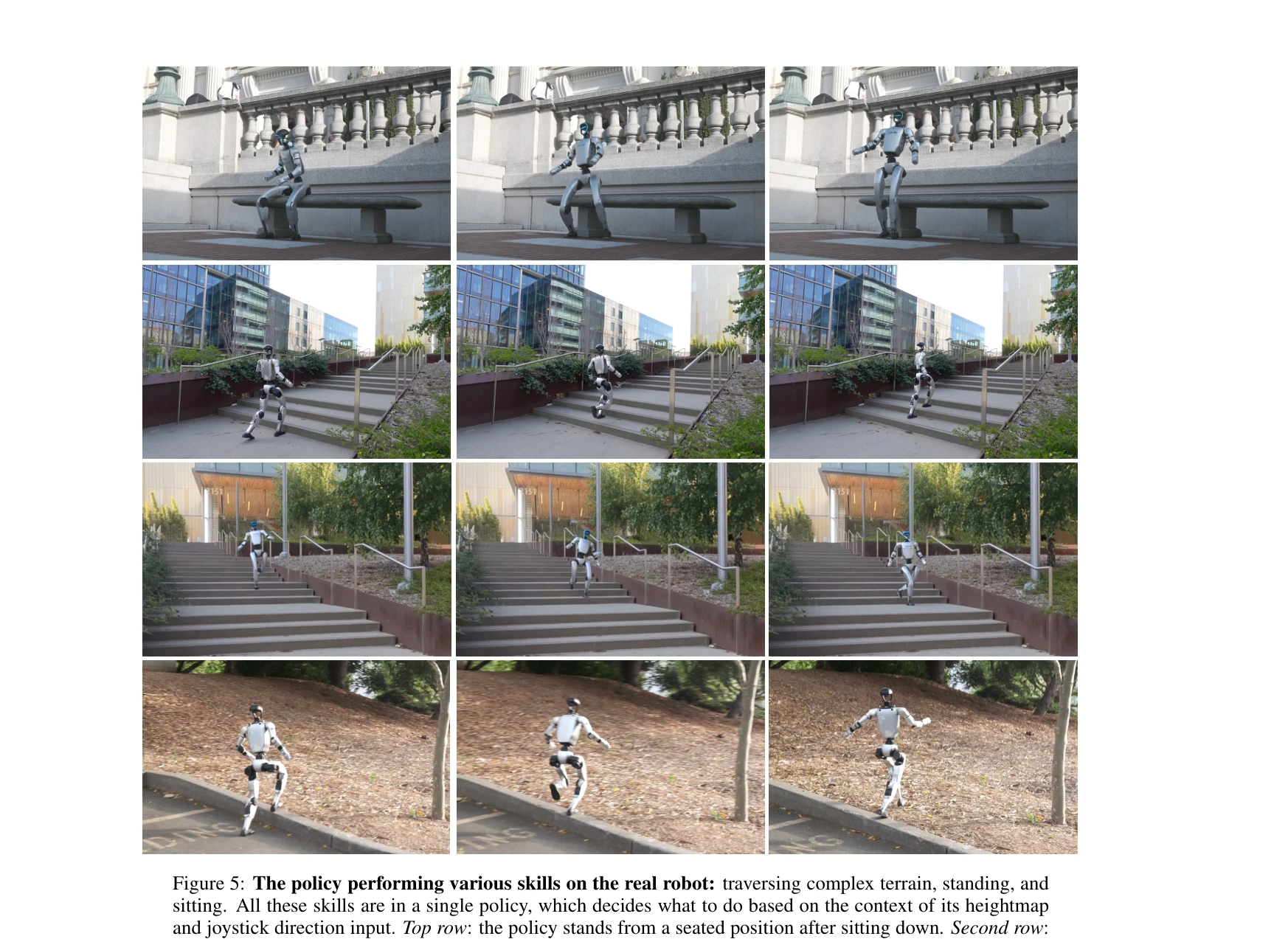
Figure 5: The policy performing various skills on the real robot: traversing complex terrain, standing, and
Figure 2: VideoMimic Real-to-Sim. A casually captured phone video provides the only input. We first
총평: 이 논문은 일상 영상으로부터 휴머노이드 로봇의 문맥-인식 제어를 가능하게 하는 실용적이고 확장 가능한 파이프라인을 제시하며, 공동 4D 재구성과 RL 기반 정책 증류의 조합으로 높은 독창성을 보인다. 실제 로봇 배포 성공은 연구의 가치를 크게 높이나, 환경 표현의 제한성과 동역학 정확도 측면에서 개선 여지가 있다.