Essence
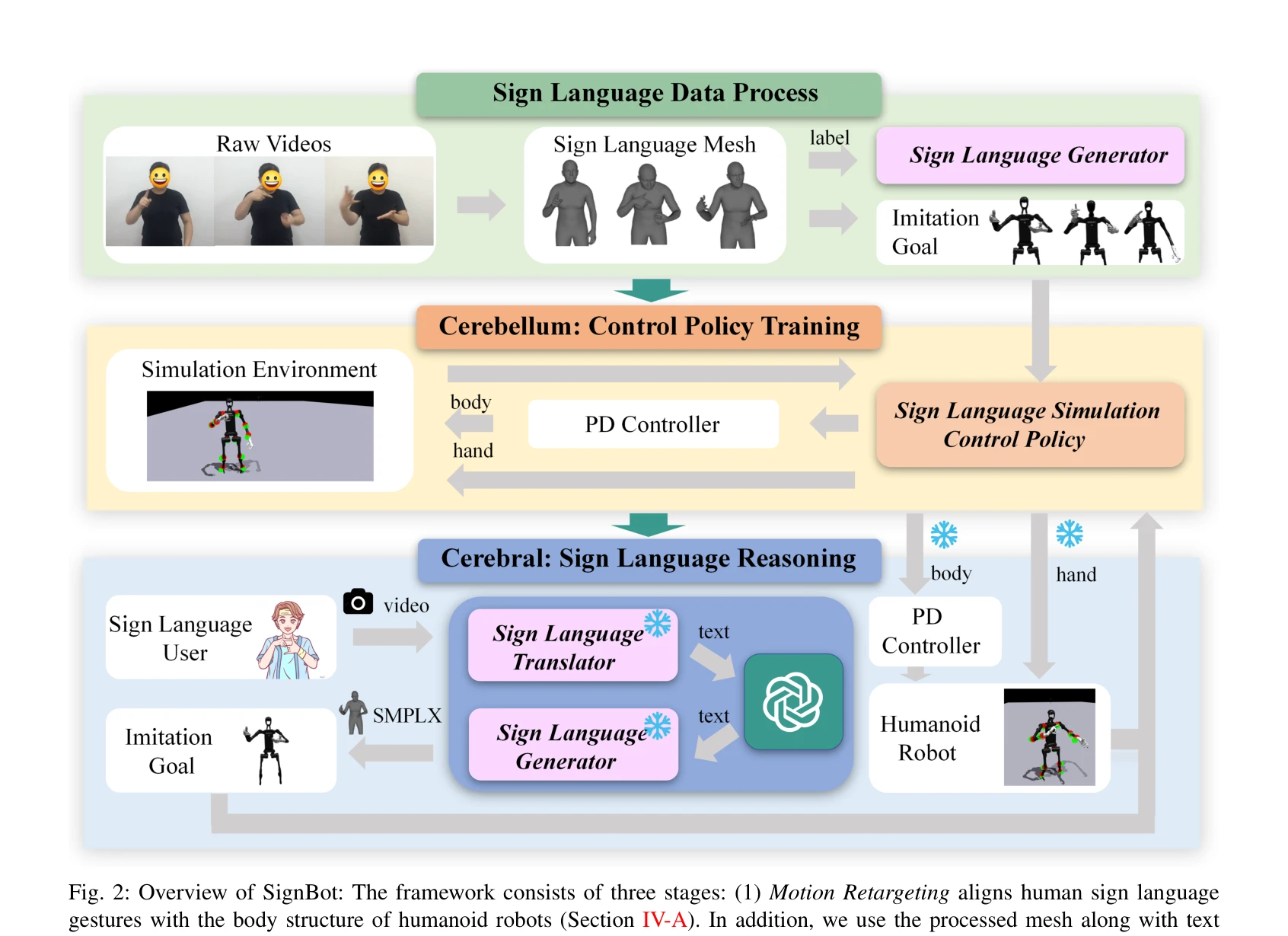
Fig. 2: Overview of SignBot: The framework consists of three stages: (1) Motion Retargeting aligns human sign language
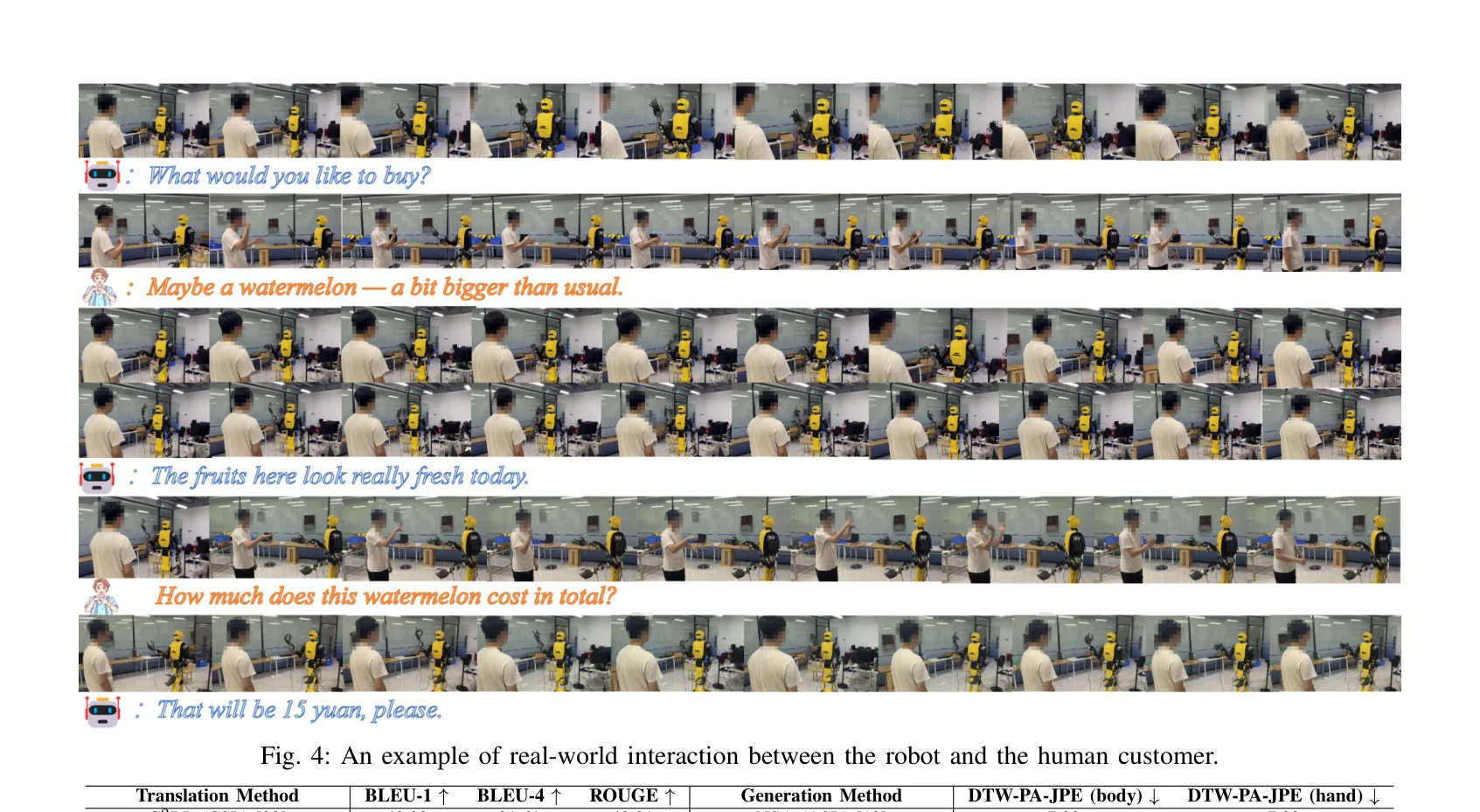
SignBot은 수화 언어를 인식하고 생성할 수 있는 인간형 로봇을 위한 프레임워크로, motion retargeting, policy training, 그리고 generative interaction을 통합하여 청각장애인과의 자연스러운 상호작용을 실현한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: SignBot은 embodied humanoid robot에서 처음으로 자동화된 sign language interaction을 구현한 혁신적 연구로, 청각장애인 커뮤니티의 의사소통 접근성 향상에 실질적 기여를 한다. 다만 hand retargeting 기술의 상세 설명과 더 광범위한 실세계 평가가 보완되면 영향력이 더욱 증대될 것으로 예상된다.