Essence
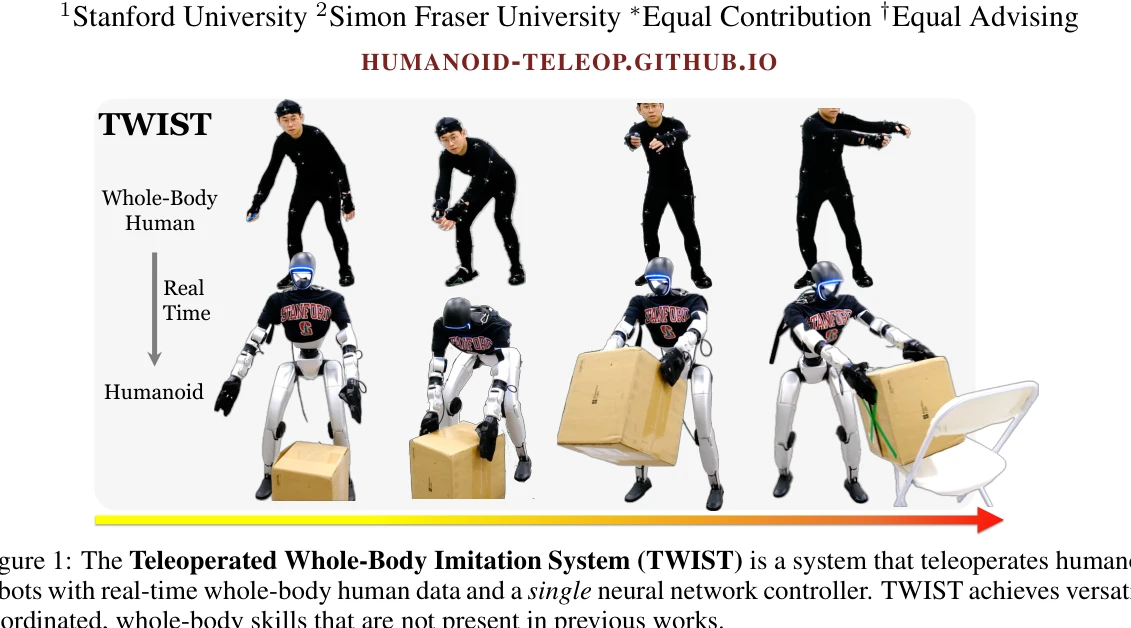
Figure 1: The Teleoperated Whole-Body Imitation System (TWIST) is a system that teleoperates humanoid
TWIST는 모션 캡처 데이터의 실시간 리타겟팅과 RL+BC 기반의 통합 신경망 컨트롤러를 통해 휴머노이드 로봇의 전신 협응 제어를 실현하는 원격 조종 시스템이다.
저자: Yanjie Ze, Zixuan Chen, João Pedro Araújo, Zi-ang Cao, Xue Bin Peng, Jiajun Wu, C. Karen Liu | 날짜: 2025-05-05 | URL: https://arxiv.org/abs/2505.02833 📄 PDF
Figure 1: The Teleoperated Whole-Body Imitation System (TWIST) is a system that teleoperates humanoid
TWIST는 모션 캡처 데이터의 실시간 리타겟팅과 RL+BC 기반의 통합 신경망 컨트롤러를 통해 휴머노이드 로봇의 전신 협응 제어를 실현하는 원격 조종 시스템이다.
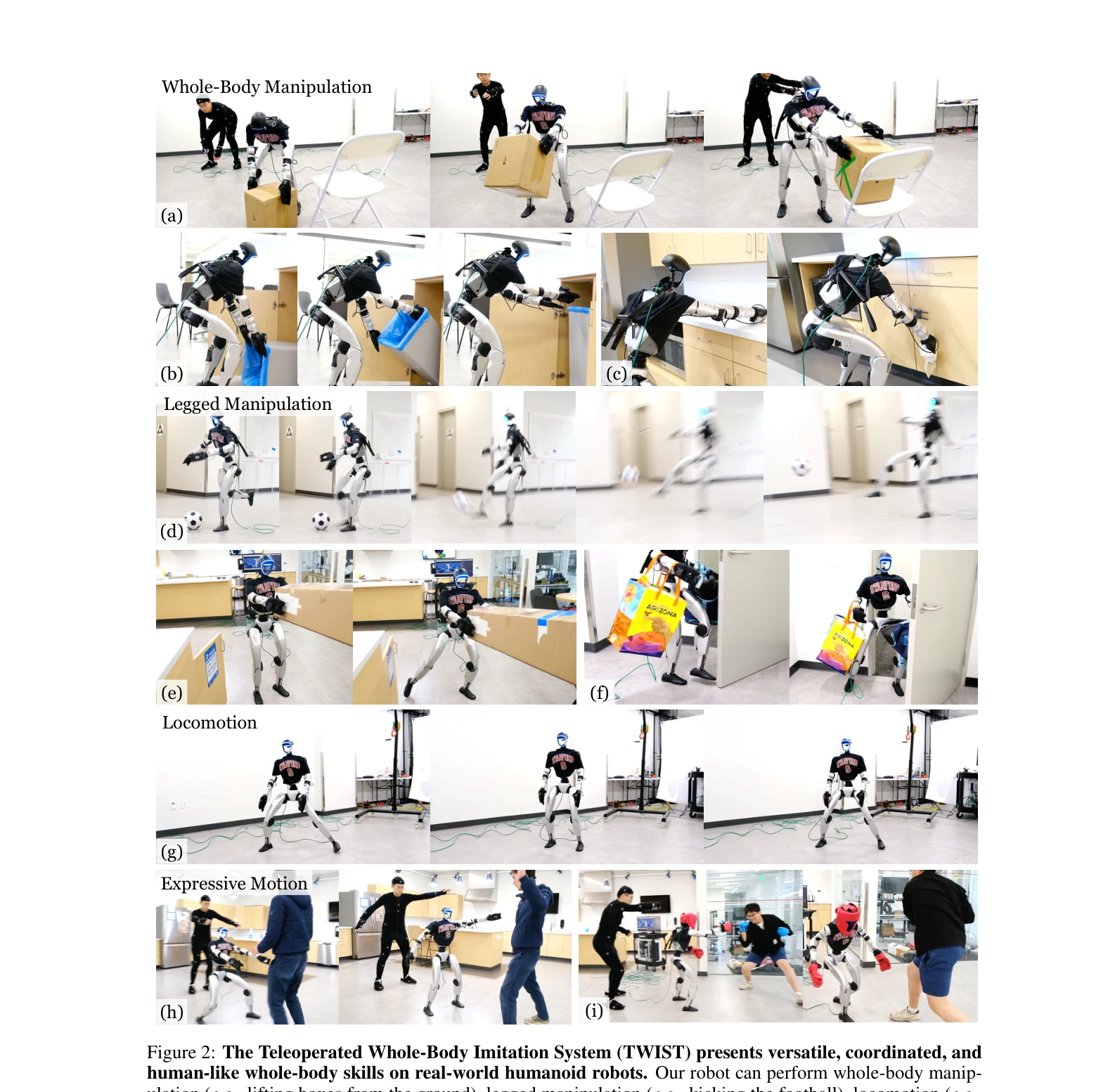
Figure 2: The Teleoperated Whole-Body Imitation System (TWIST) presents versatile, coordinated, and
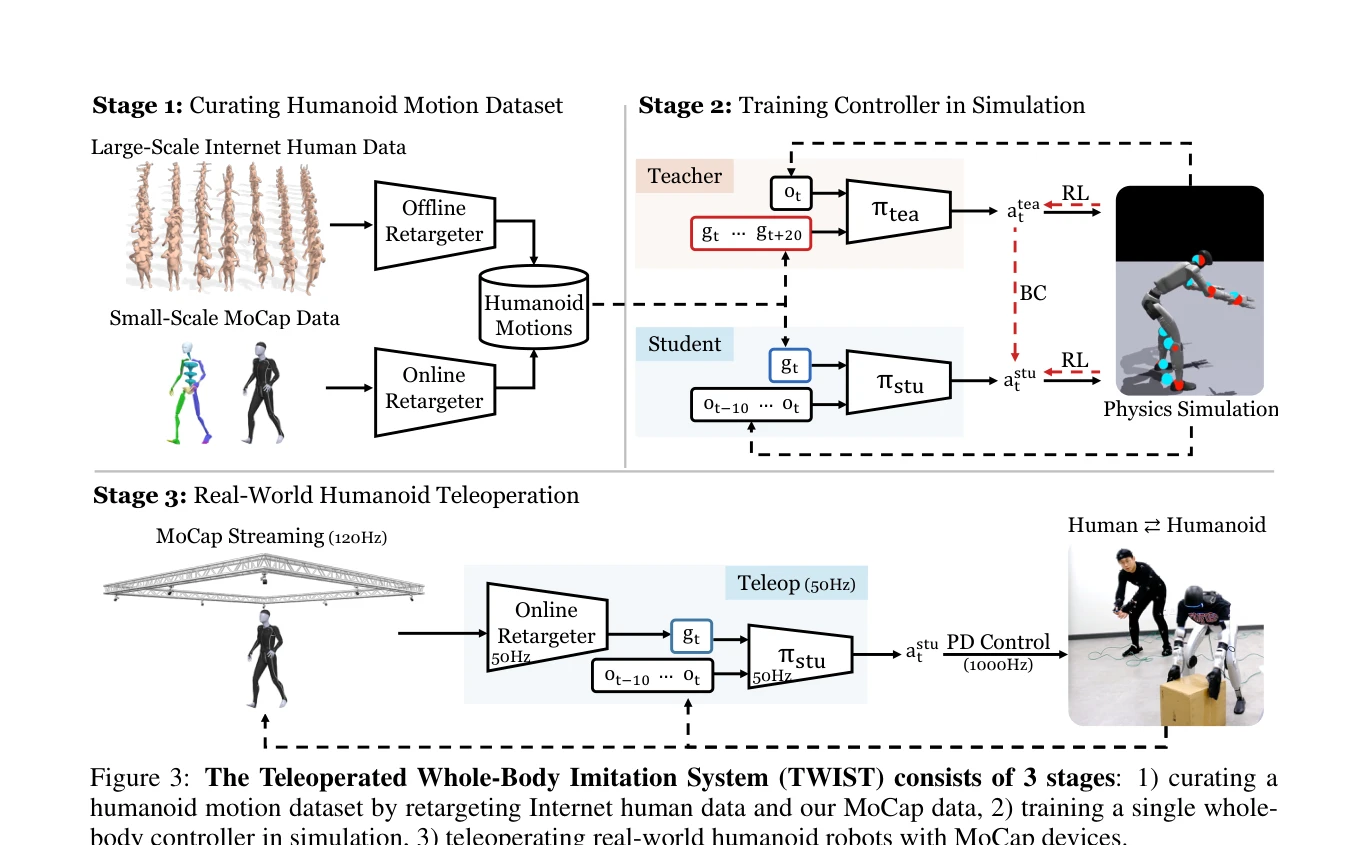
Figure 3: The Teleoperated Whole-Body Imitation System (TWIST) consists of 3 stages: 1) curating a
총평: TWIST는 전신 협응 휴머노이드 원격 조종의 오래된 과제를 teacher-student 프레임워크와 데이터 혼합 전략으로 우아하게 해결하며, 단일 신경망으로 다양한 협응 기술을 실현한 의미 있는 기여이다.