Essence
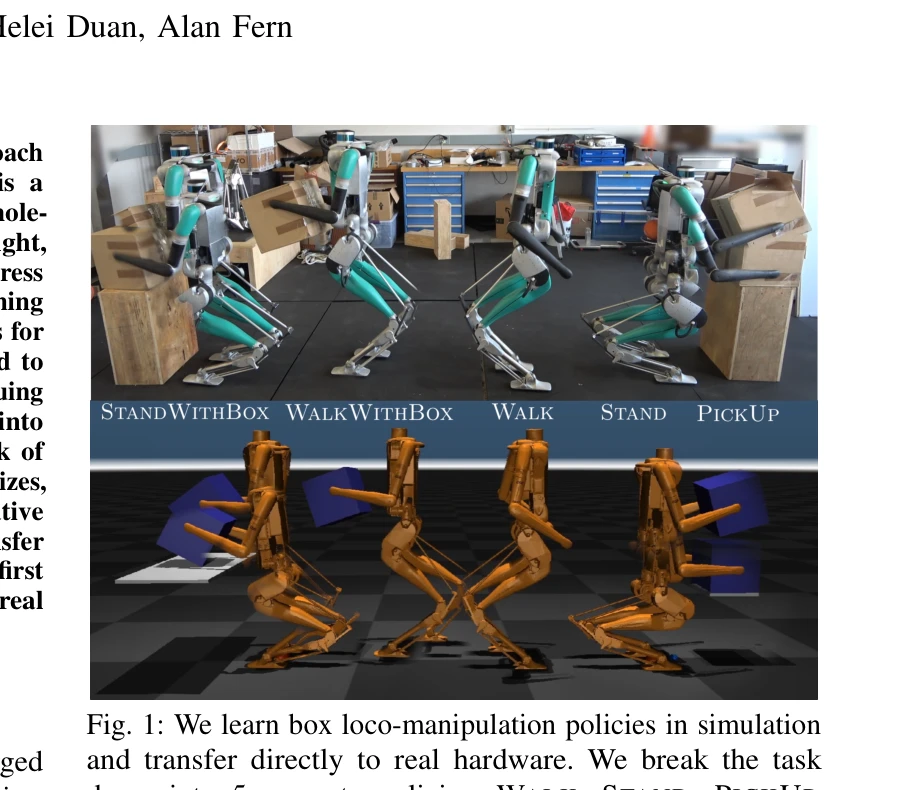
Fig. 1: We learn box loco-manipulation policies in simulation
본 연구는 인간형 로봇 Digit의 박스 집기 및 운반 작업을 위해 강화학습 기반의 sim-to-real 접근법을 제시하며, 5가지 분리된 정책(걷기, 서기, 집기, 박스 들고 걷기, 박스 들고 서기)을 학습하여 실제 하드웨어에서 성공적으로 전이했다.
저자: Jeremy Dao, Helei Duan, Alan Fern | 날짜: 2023-10-04 | URL: https://arxiv.org/abs/2310.03191 📄 PDF
Fig. 1: We learn box loco-manipulation policies in simulation
본 연구는 인간형 로봇 Digit의 박스 집기 및 운반 작업을 위해 강화학습 기반의 sim-to-real 접근법을 제시하며, 5가지 분리된 정책(걷기, 서기, 집기, 박스 들고 걷기, 박스 들고 서기)을 학습하여 실제 하드웨어에서 성공적으로 전이했다.
Fig. 1: We learn box loco-manipulation policies in simulation
총평: 본 논문은 인간형 이족 로봇의 복합적인 loco-manipulation 작업에 대한 첫 sim-to-real RL 성공 사례를 제시하며, 실용적인 보상 함수 설계와 action space 선택을 통해 자연스러운 동작을 학습했다는 점에서 의의가 있다. 다만 phase 관리의 경직성과 박스 pose 추정 오차 등 개선의 여지가 있어 기술적으로는 중간 수준이지만 실제 하드웨어 적용이라는 중요한 성과와 명확한 기여로 높은 가치를 가진다.