Essence
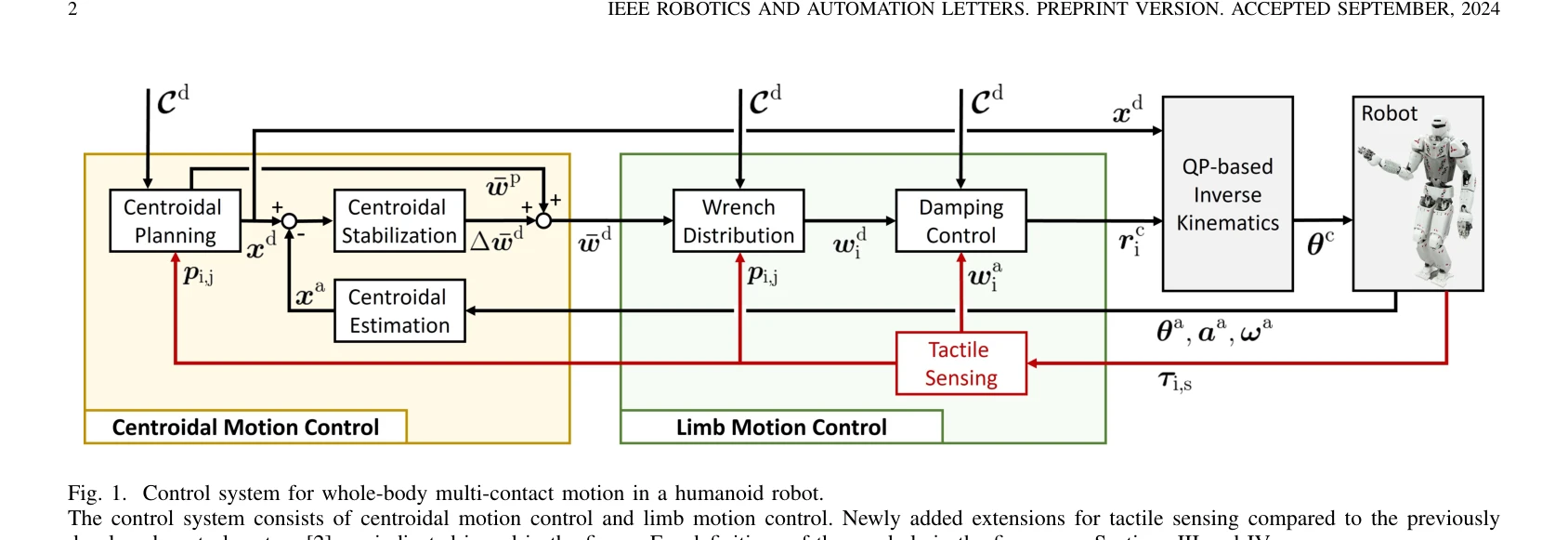
Fig. 1. Control system for whole-body multi-contact motion in a humanoid robot.
휴머노이드 로봇이 분산 촉각 센서를 장착하여 팔꿈치, 무릎 등 중간 영역의 접촉을 포함한 전신 다중 접촉 모션을 제어하는 방법을 개발했다.
저자: Masaki Murooka, Kensuke Fukumitsu, Marwan Hamze, Mitsuharu Morisawa, Hiroshi Kaminaga, Fumio Kanehiro, Eiichi Yoshida | 날짜: 2025-05-26 | URL: https://arxiv.org/abs/2505.19580 📄 PDF
Fig. 1. Control system for whole-body multi-contact motion in a humanoid robot.
휴머노이드 로봇이 분산 촉각 센서를 장착하여 팔꿈치, 무릎 등 중간 영역의 접촉을 포함한 전신 다중 접촉 모션을 제어하는 방법을 개발했다.
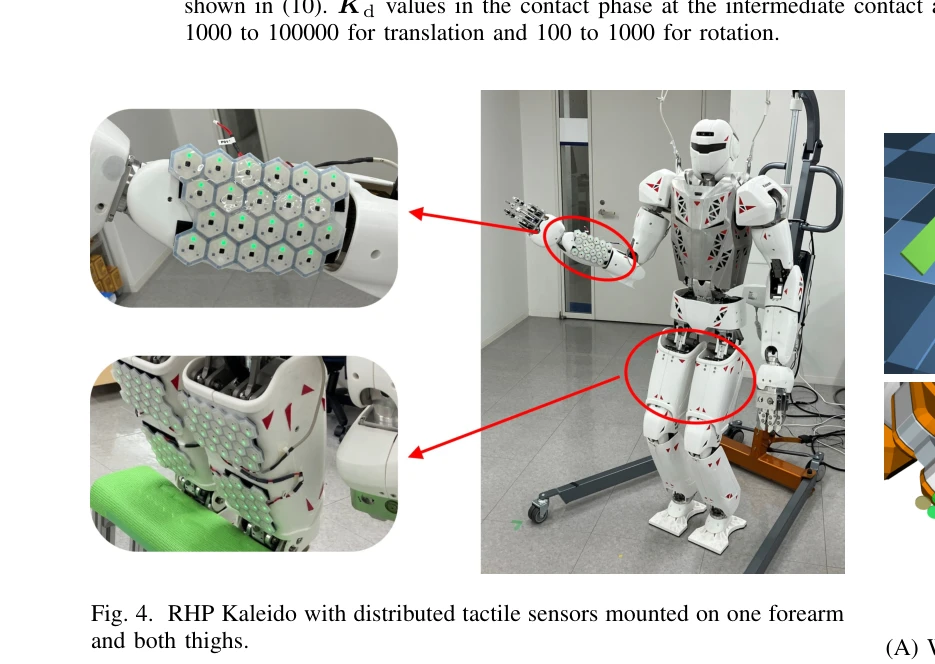
Fig. 4. RHP Kaleido with distributed tactile sensors mounted on one forearm
Fig. 1. Control system for whole-body multi-contact motion in a humanoid robot.
총평: 본 논문은 distributed tactile sensor를 활용하여 휴머노이드 로봇의 전신 다중 접촉 모션을 처음으로 실현한 의미 있는 연구로, 방법론과 검증이 체계적이나 autonomous planning 미흡이 제한적이다.