Essence
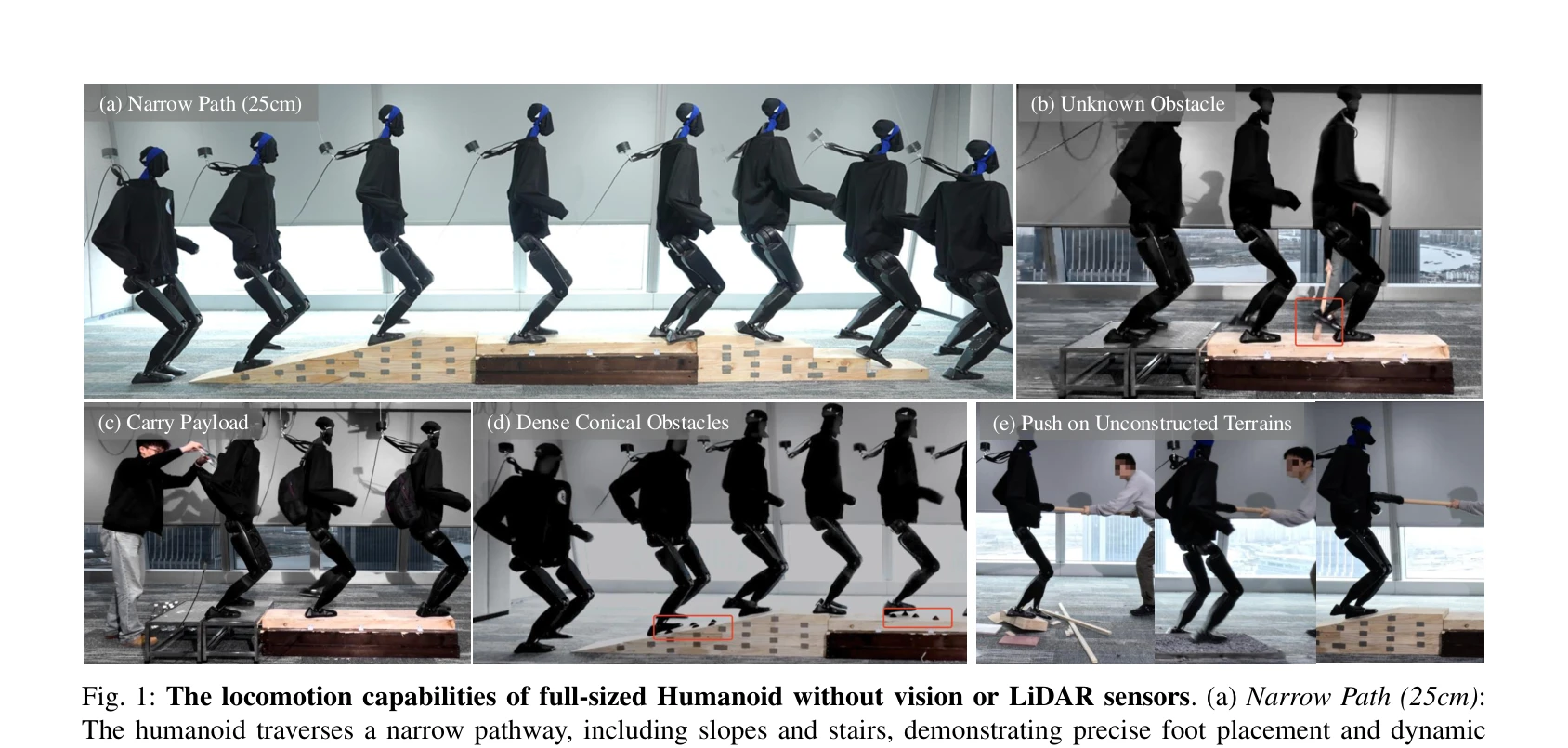
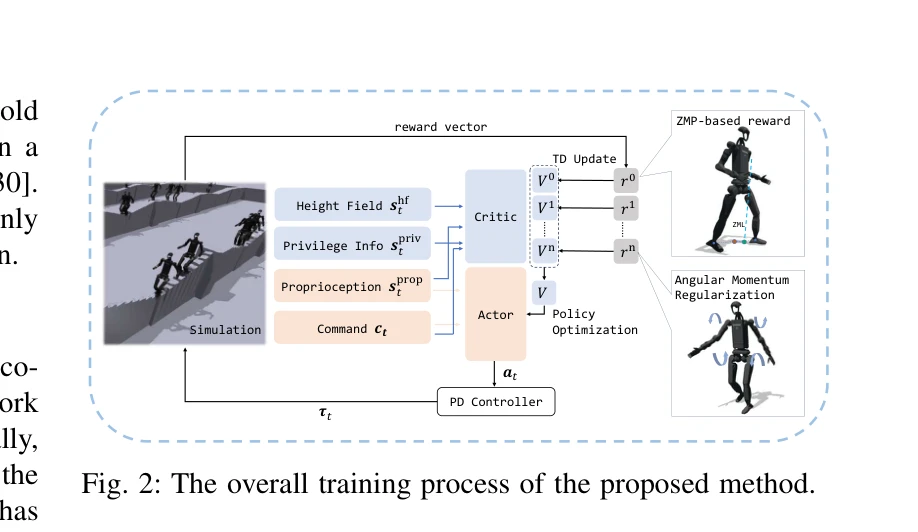
Fig. 1: The locomotion capabilities of full-sized Humanoid without vision or LiDAR sensors. (a) Narrow Path (25cm):
ZMP(Zero Moment Point) 기반 리워드와 강화학습을 결합한 동적 균형 메커니즘을 도입하여, 휴머노이드 로봇이 외부 센서 없이 고유감각만으로 좁은 경로와 예상 못한 장애물이 있는 극단적 지형을 안정적으로 통과하도록 하는 전신 보행 알고리즘을 제안한다.