Essence
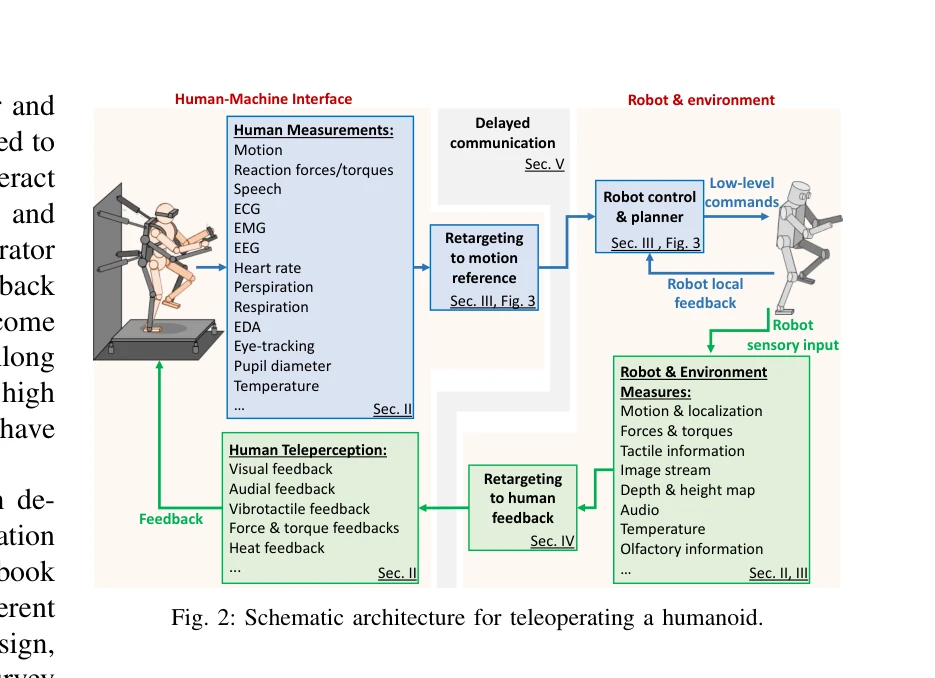
Fig. 2: Schematic architecture for teleoperating a humanoid.
이 논문은 인간형 로봇의 원격 조종(teleoperation) 분야에 대한 포괄적인 서베이로, 시스템 아키텍처, 기술 및 방법론적 진전, 실제 응용 분야를 종합적으로 분석한다.
저자: Kourosh Darvish, Luigi Penco, Joao Ramos, Rafael Cisneros, Jerry Pratt, Eiichi Yoshida, Serena Ivaldi, Daniele Pucci | 날짜: 2023-01-11 | URL: https://arxiv.org/abs/2301.04317 📄 PDF
Fig. 2: Schematic architecture for teleoperating a humanoid.
이 논문은 인간형 로봇의 원격 조종(teleoperation) 분야에 대한 포괄적인 서베이로, 시스템 아키텍처, 기술 및 방법론적 진전, 실제 응용 분야를 종합적으로 분석한다.
Fig. 2: Schematic architecture for teleoperating a humanoid.
Fig. 2: Schematic architecture for teleoperating a humanoid.
총평: 이 서베이는 humanoid robot teleoperation의 포괄적이고 최신의 개요를 제공하며, 복잡한 시스템을 명확한 아키텍처로 정리하고 다양한 기술적 도전과 솔루션을 체계적으로 분석한다. 해당 분야의 연구자와 실무자들에게 매우 유용한 참고 자료이지만, 구체적인 기술 혁신보다는 기존 연구의 종합과 정리에 초점을 두고 있다.