Essence
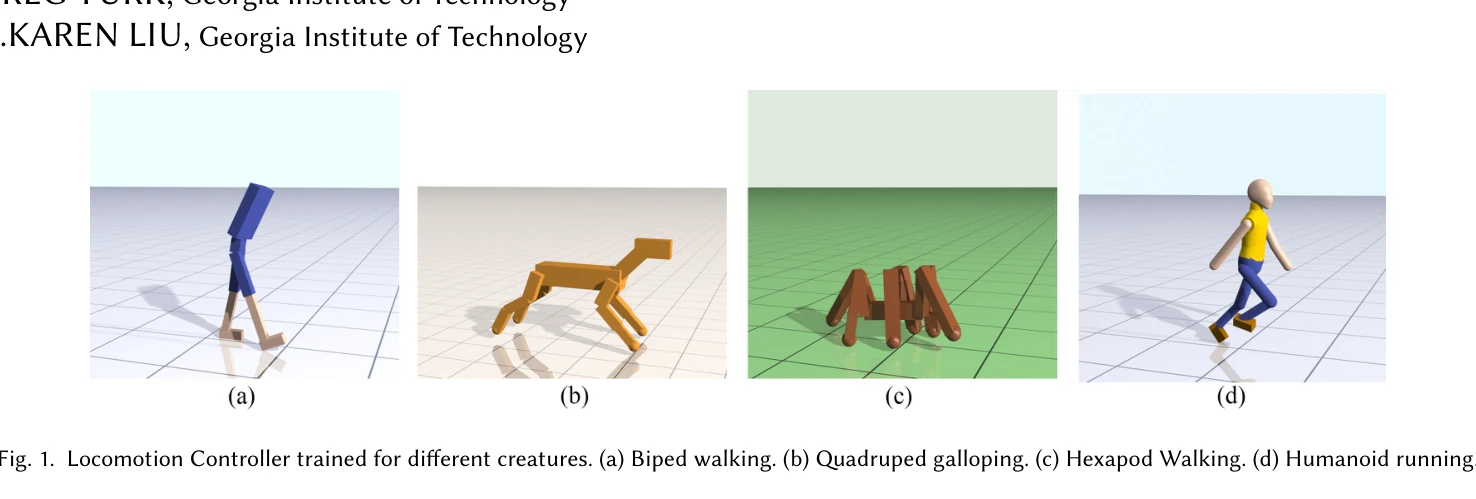
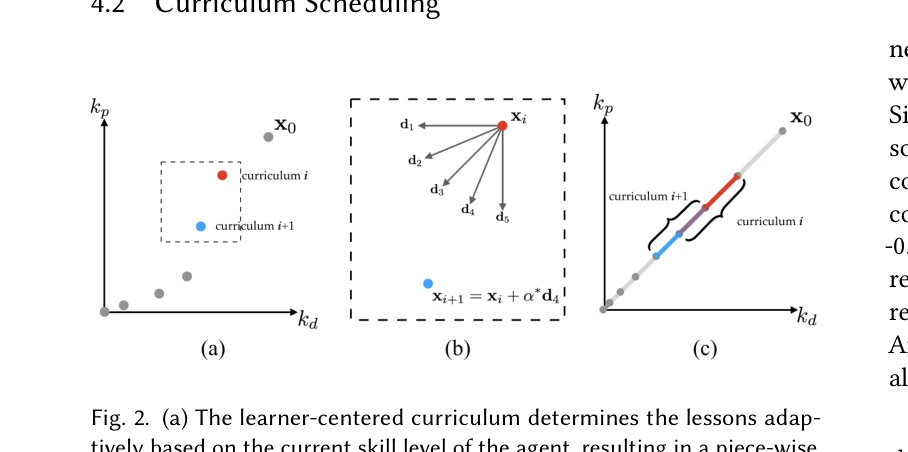
Fig. 1. Locomotion Controller trained for different creatures. (a) Biped walking. (b) Quadruped galloping. (c) Hexapod W
본 논문은 심층 강화학습(DRL)을 사용하여 motion capture나 finite state machine 없이 대칭적이고 저에너지의 자연스러운 로코모션을 학습하는 방법을 제안한다. 손실 함수에 미러 대칭성 손실항을 추가하고, 점진적으로 물리적 보조를 완화하는 curriculum learning 방법을 통해 다양한 형태의 캐릭터(이족, 사족, 육족)에서 효과적인 보행 제어기를 자동으로 생성할 수 있음을 보여준다.