Essence
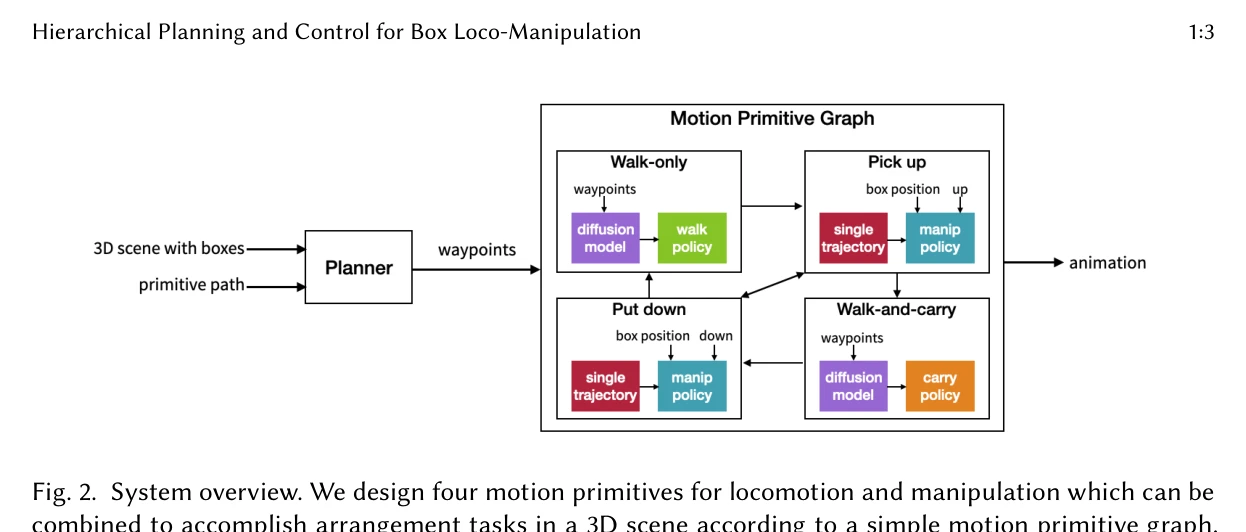
Fig. 2. System overview. We design four motion primitives for locomotion and manipulation which can be
물리 기반 시뮬레이션 인간 캐릭터가 box rearrangement 작업을 수행하기 위해 계획, diffusion model, 강화학습을 계층적으로 조합하는 시스템을 제시한다.
저자: Zhaoming Xie, Jonathan Tseng, Sebastian Starke, Michiel van de Panne, C. Karen Liu | 날짜: 2023-06-15 | URL: https://arxiv.org/abs/2306.09532 📄 PDF
Fig. 2. System overview. We design four motion primitives for locomotion and manipulation which can be
물리 기반 시뮬레이션 인간 캐릭터가 box rearrangement 작업을 수행하기 위해 계획, diffusion model, 강화학습을 계층적으로 조합하는 시스템을 제시한다.
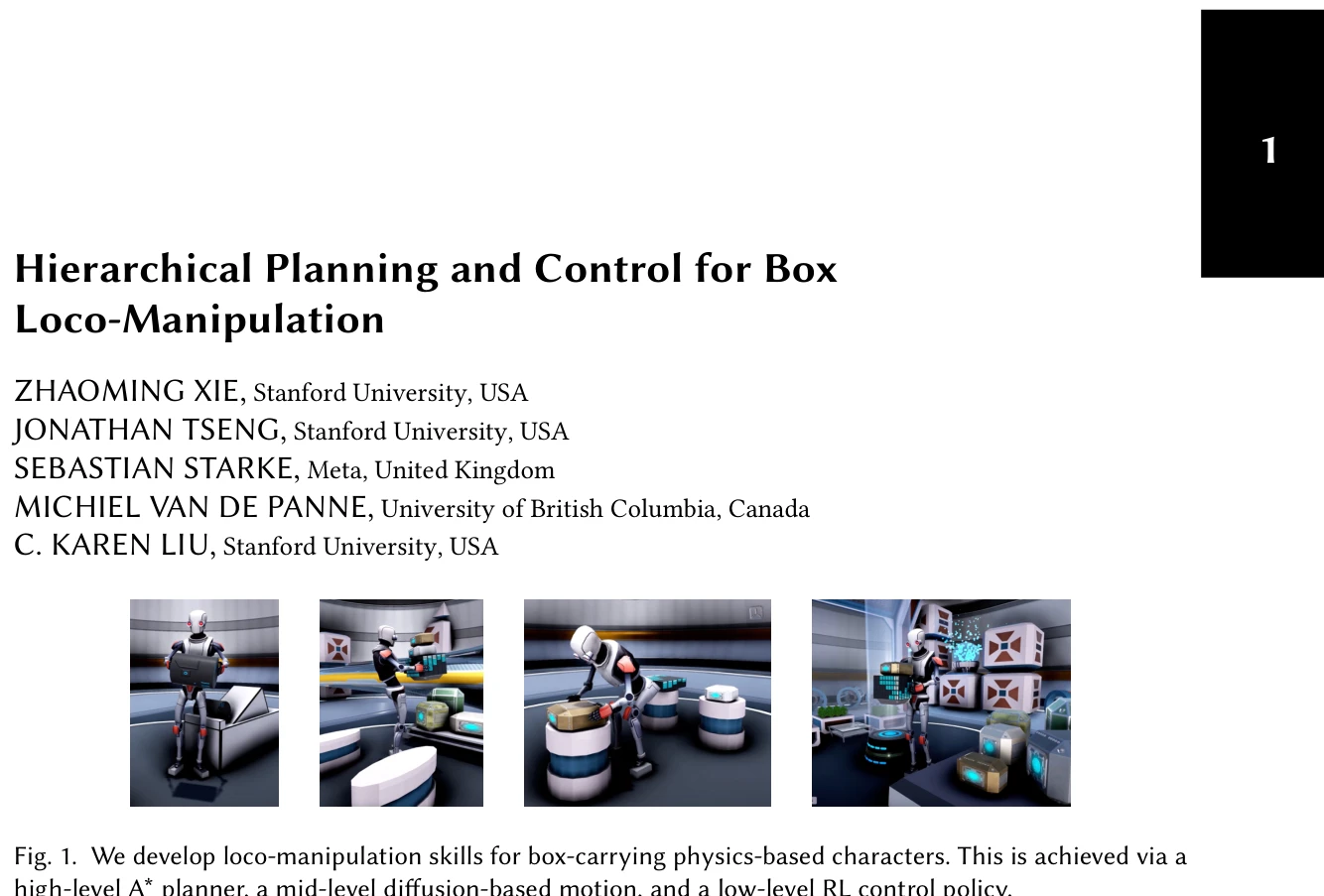
Fig. 1. We develop loco-manipulation skills for box-carrying physics-based characters. This is achieved via a
Fig. 2. System overview. We design four motion primitives for locomotion and manipulation which can be
총평: 본 논문은 물리 기반 캐릭터 애니메이션에서 loco-manipulation의 도전적인 문제를 diffusion model과 RL을 계층적으로 조합하여 우아하게 해결하며, 높은 기술적 완성도와 실용적 가치를 동시에 갖춘 우수한 연구이다.