Essence
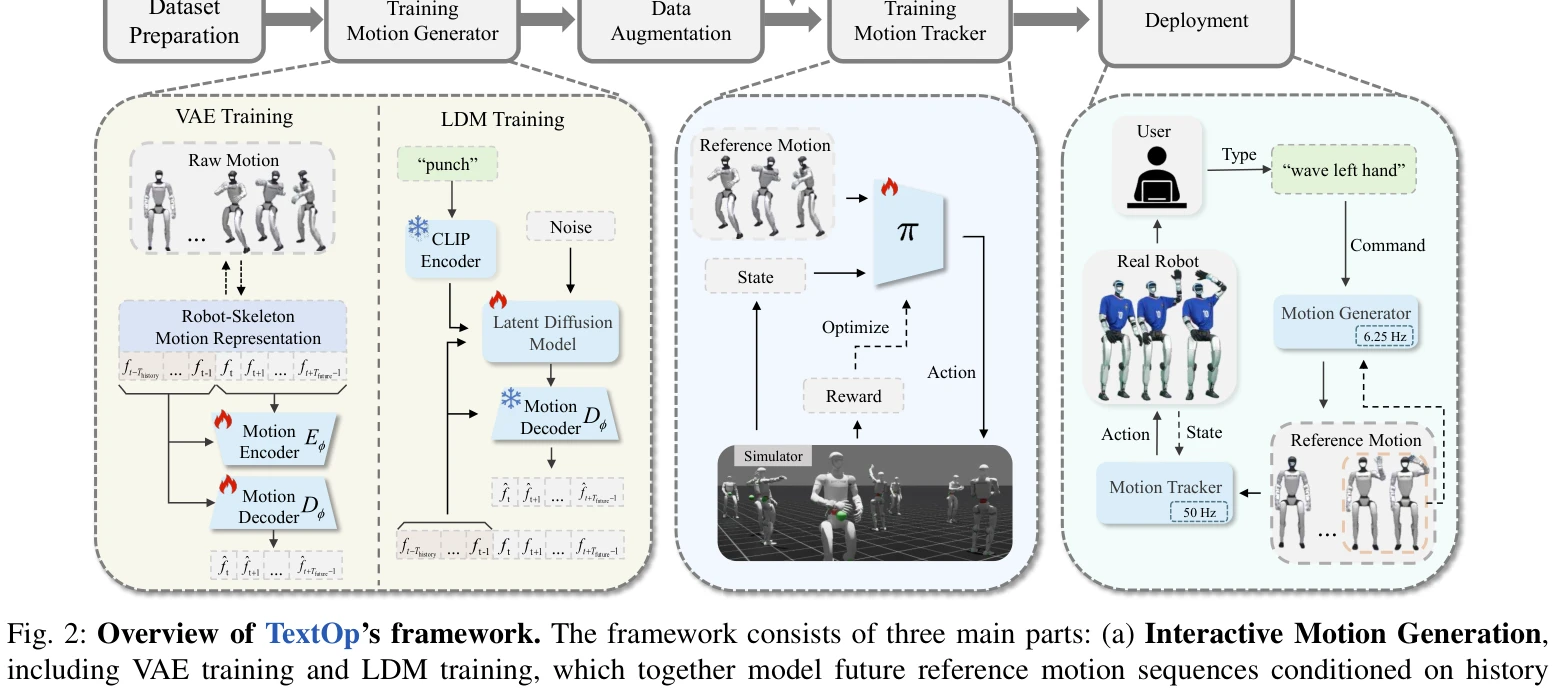
Fig. 2: Overview of TextOp’s framework. The framework consists of three main parts: (a) Interactive Motion Generation,
TextOp는 streaming 자연어 명령으로 인간형 로봇의 운동을 실시간으로 생성하고 제어하는 프레임워크로, 고수준의 autoregressive motion diffusion 모델과 저수준의 motion tracking policy를 결합하여 실행 중 동적으로 명령 수정을 지원한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: TextOp는 실시간 interactive motion generation과 robust physical control을 성공적으로 통합하여 자연어 기반 humanoid 제어의 새로운 paradigm을 제시한 뛰어난 연구이며, 실제 로봇 실험을 통해 실현 가능성을 검증했다. 다만 플랫폼 특화성과 데이터셋 의존성을 개선한다면 더욱 광범위한 영향을 미칠 수 있을 것으로 예상된다.