Essence
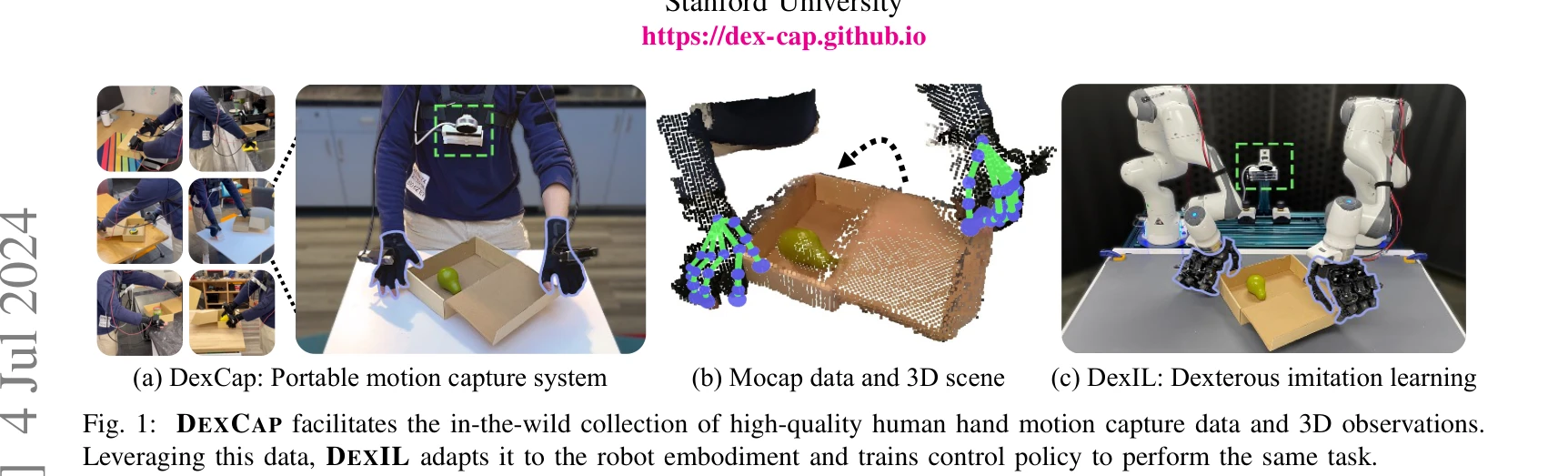
Fig. 1: DEXCAP facilitates the in-the-wild collection of high-quality human hand motion capture data and 3D observations
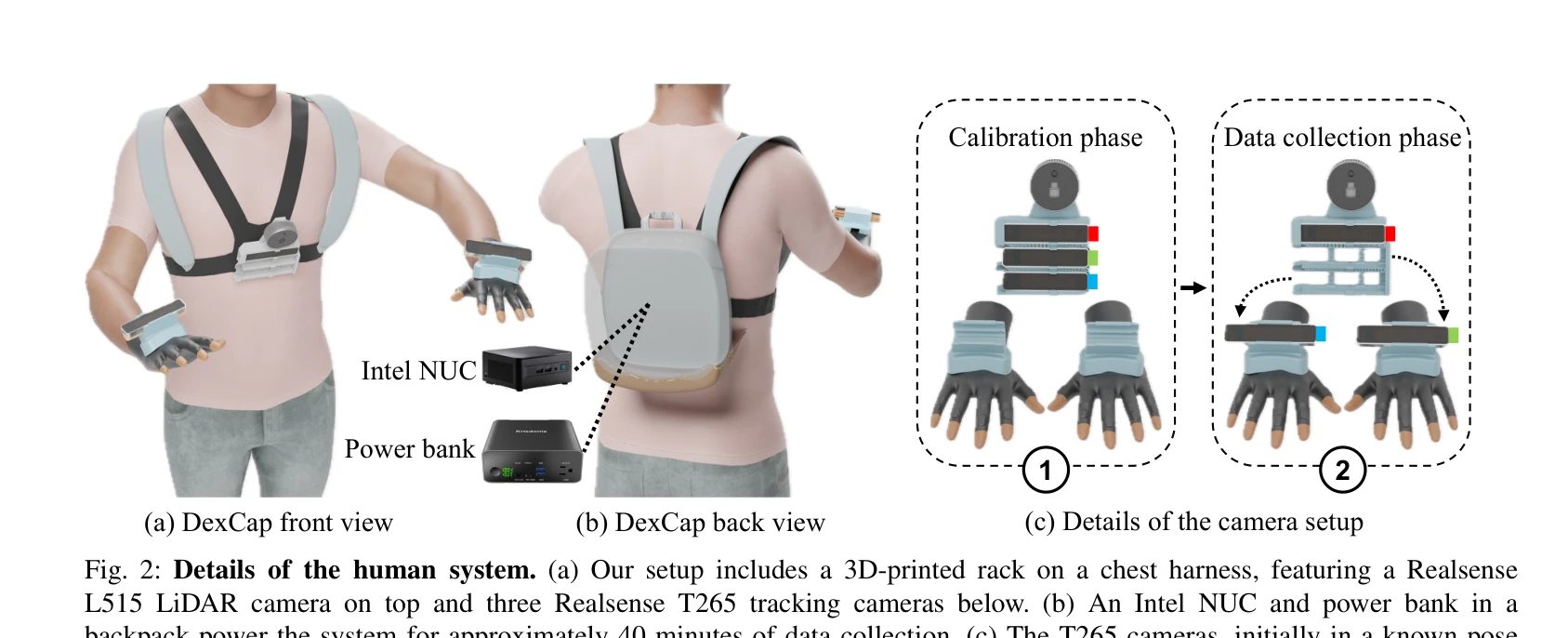
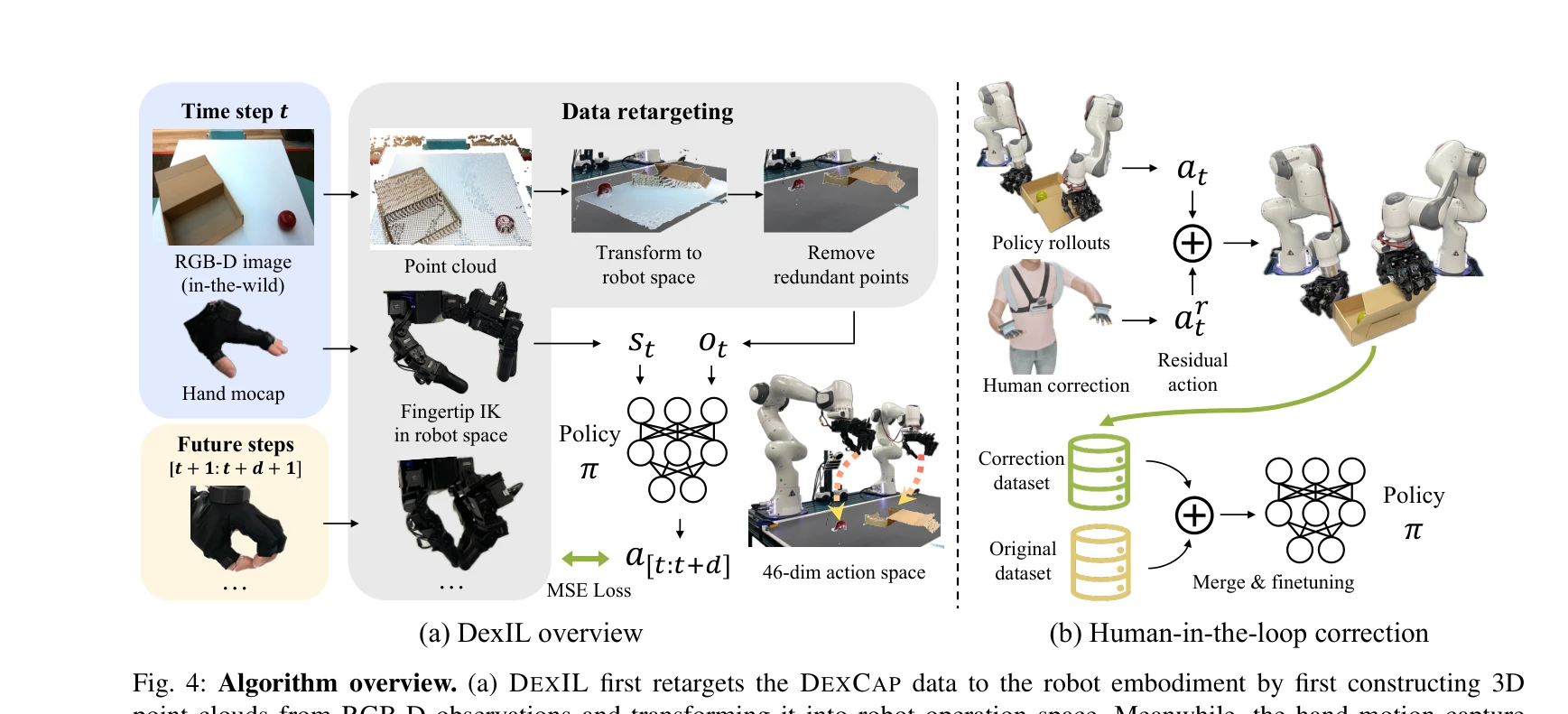
DexCap은 SLAM과 전자기장을 활용한 휴대용 손 모션캡처 시스템이며, DexIL은 이 데이터로부터 역운동학과 point cloud 기반 모방학습을 통해 로봇이 손가락 조작을 직접 학습하도록 하는 알고리즘이다.