Essence
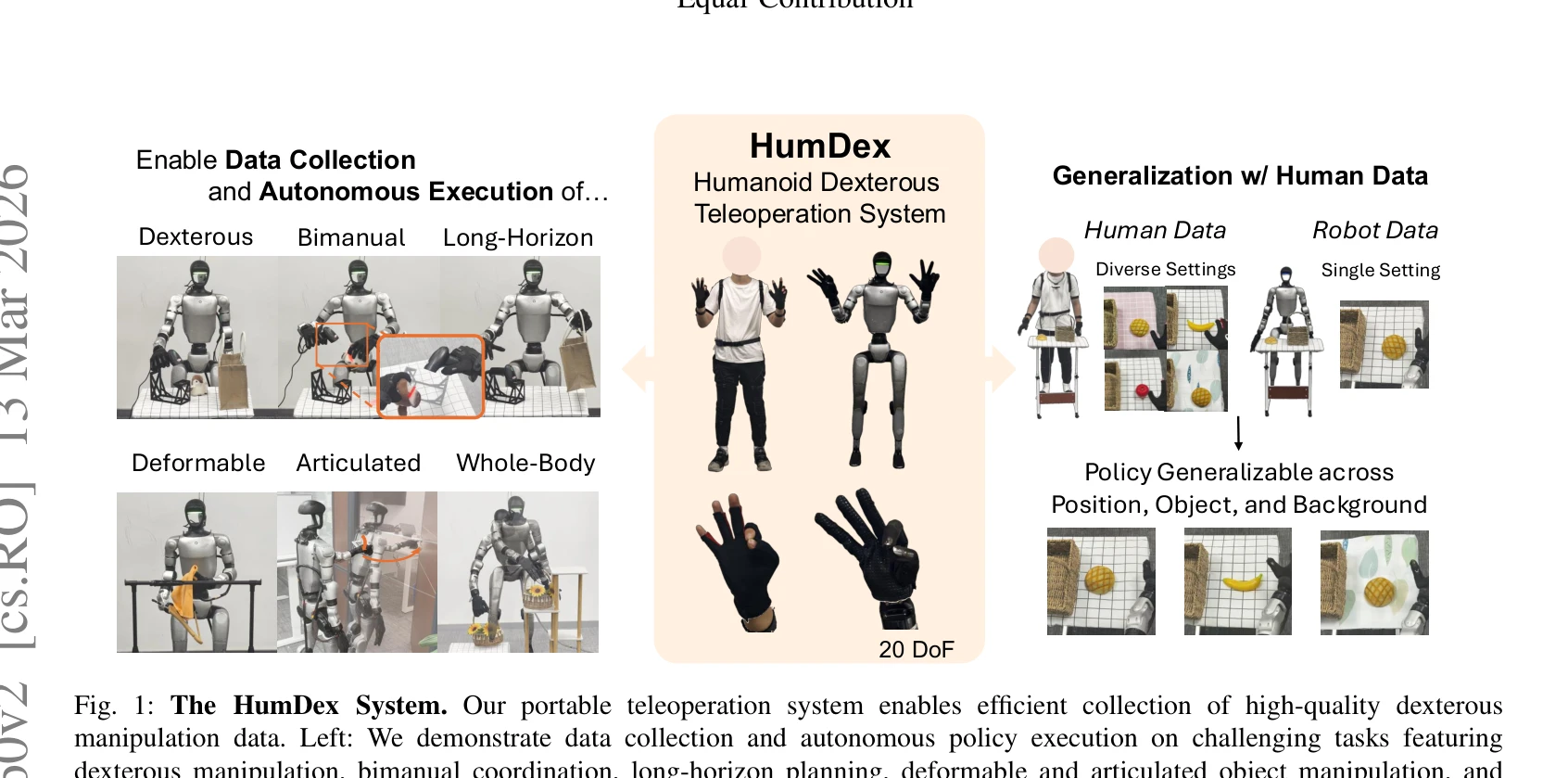
Fig. 1: The HumDex System. Our portable teleoperation system enables efficient collection of high-quality dexterous
IMU 기반 모션 트래킹을 활용한 휴머노이드 전신 손재주 조작 텔레오퍼레이션 시스템으로, learning-based hand retargeting과 human 데이터 사전학습을 통해 최소 데이터로 높은 일반화 성능을 달성한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: IMU 기반 휴대용 텔레오퍼레이션과 learning-based hand retargeting, human 데이터 활용의 three-pronged 접근으로 humanoid 손재주 조작 데이터 수집의 오래된 병목을 효과적으로 해결한 높은 수준의 시스템 논문이다. 재현성 높은 설계와 충분한 실험 검증으로 실제 영향력이 클 것으로 예상된다.