저자: Irmak Guzey, Haozhi Qi, Julen Urain, Changhao Wang, Jessica Yin, Krishna Bodduluri, Mike Lambeta, Lerrel Pinto, Akshara Rai, Jitendra Malik, Tingfan Wu, Akash Sharma, Homanga Bharadhwaj | 날짜: 2025-11-20 | URL: https://arxiv.org/abs/2511.16661 📄 PDF
Essence
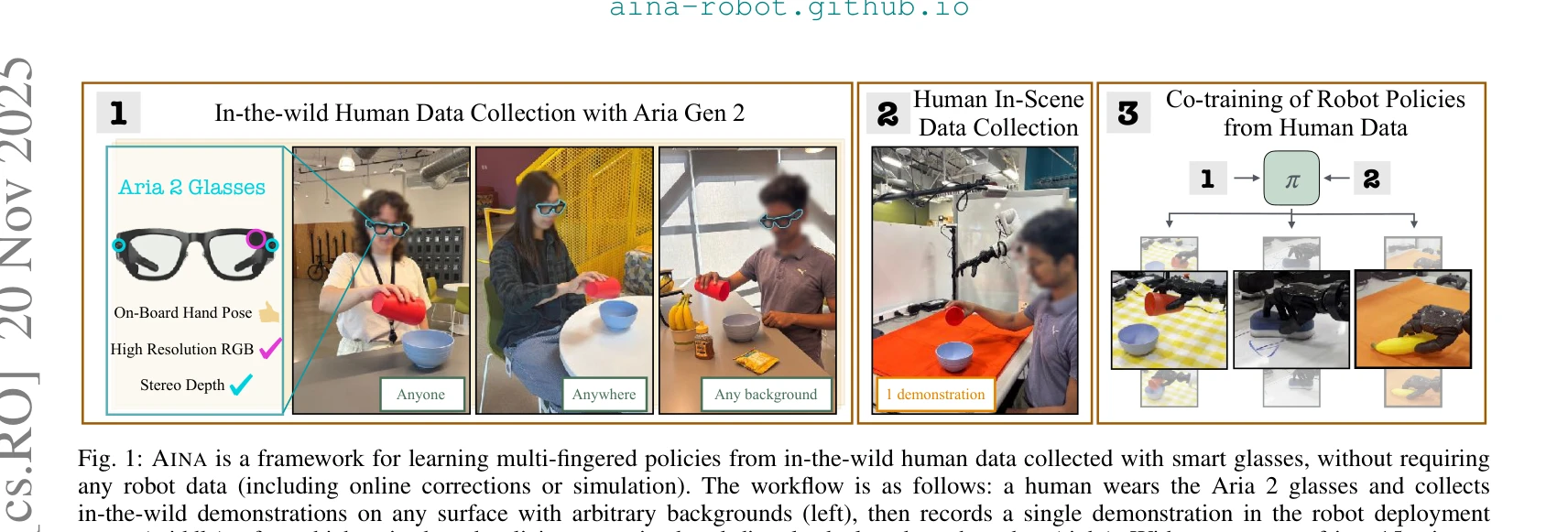
Fig. 1: AINA is a framework for learning multi-fingered policies from in-the-wild human data collected with smart glasse
Aria Gen 2 스마트 글래스로 수집한 in-the-wild 인간 영상만으로 로봇용 다중 손가락 조작 정책을 학습하는 AINA 프레임워크를 제안한다. 이는 로봇 데이터나 시뮬레이션 없이도 직접 배포 가능한 3D point-based 정책을 생성한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 이 논문은 스마트 글래스의 고급 센싱 능력을 창의적으로 활용하여 순수 인간 비디오만으로 다중 손가락 로봇 조작 정책을 학습하는 실질적이고 확장 가능한 해법을 제시한다. 강력한 실증 결과와 명확한 방법론으로 인간-로봇 모방 학습 분야에 상당한 진전을 이루었으며, 로봇 조작의 대규모 실용화를 향한 중요한 한 걸음을 제공한다.