Essence
Figure 2. Concept of SkillMimic. We define an interaction skill as
SkillMimic은 skill-specific reward 설계 없이 통합된 HOI imitation reward를 사용하여 단일 policy로 다양한 농구 상호작용 기술을 학습하고 합성할 수 있는 data-driven 프레임워크다.
저자: Yinhuai Wang, Qihan Zhao, Runyi Yu, Hok Wai Tsui, Ailing Zeng, Jing Lin, Zhengyi Luo, Jiwen Yu, Xiu Li, Qifeng Chen, Jian Zhang, Lei Zhang, Ping Tan | 날짜: 2024-08-12 | URL: https://arxiv.org/abs/2408.15270 📄 PDF
Figure 2. Concept of SkillMimic. We define an interaction skill as
SkillMimic은 skill-specific reward 설계 없이 통합된 HOI imitation reward를 사용하여 단일 policy로 다양한 농구 상호작용 기술을 학습하고 합성할 수 있는 data-driven 프레임워크다.
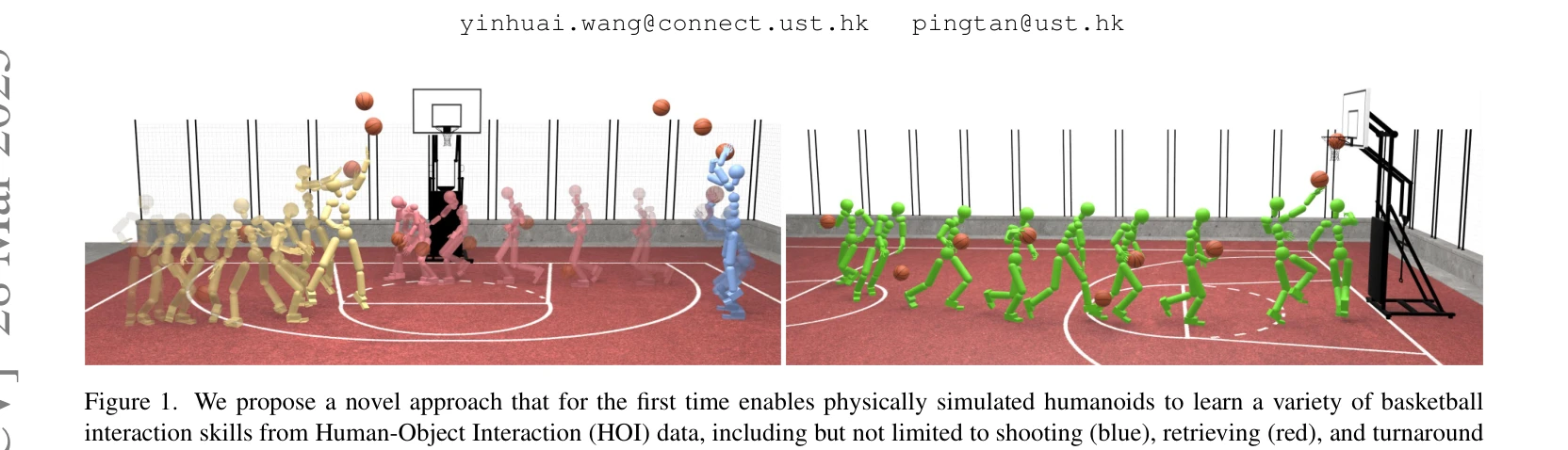
Figure 1. We propose a novel approach that for the first time enables physically simulated humanoids to learn a variety
Fig. 3 (b) shows the training pipeline of SkillMimic. Given
총평: SkillMimic은 skill-specific reward 제거를 통해 상호작용 기술 학습의 실용성을 혁신적으로 개선했으며, contact graph와 통합 HOI reward 설계는 기술적으로 견고하고 농구 데이터셋 기여와 함께 이 분야의 significant advance를 이룬다.