Essence
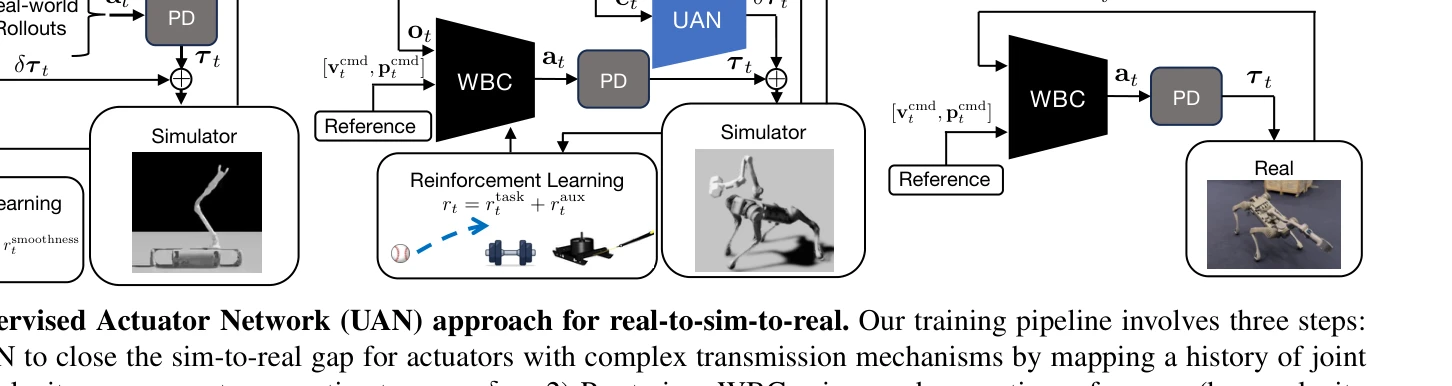
Fig. 2: Unsupervised Actuator Network (UAN) approach for real-to-sim-to-real. Our training pipeline involves three steps
로봇의 운동 조작 작업에서 시뮬레이션-현실 간 격차를 줄이기 위해 실제 데이터로부터 액추에이터 동역학을 학습하는 Unsupervised Actuator Net (UAN)과 참조 궤적을 탐색 힌트로 활용하는 두 단계 학습 파이프라인을 제안한다.