저자: Jingkai Sun, Gang Han, Pihai Sun, Wen Zhao, Jiahang Cao, Jiaxu Wang, Yijie Guo, Qiang Zhang | 날짜: 2025-10-08 | URL: https://arxiv.org/abs/2510.07152 📄 PDF
Essence
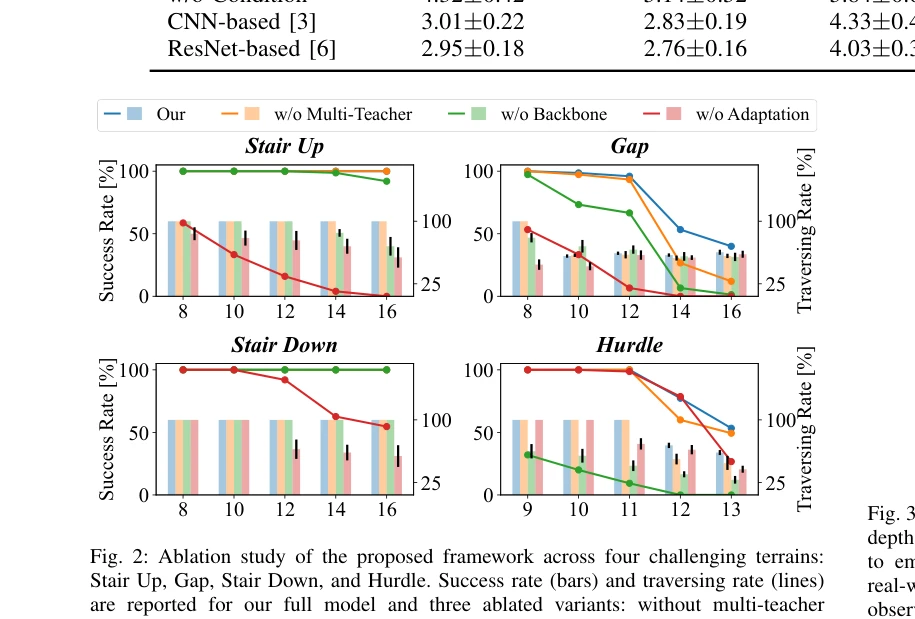
Fig. 1: Overview of the proposed teacher–student distillation framework for humanoid perceptive locomotion. (A) The stud
휴머노이드 로봇의 깊이 이미지만을 사용한 지형 인식 보행을 위해, 현실적인 깊이 합성과 cross-attention transformer를 결합하여 사전 학습된 blind policy를 기반으로 효율적인 정책 학습을 가능하게 한다.
Evaluation
Novelty: 4/5 Technical Soundness: 4/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 이 논문은 humanoid 로봇의 깊이 기반 보행에서 sim-to-real gap과 효율성 문제를 체계적으로 해결하는 통합 프레임워크를 제시하며, self-occlusion-aware 깊이 합성, cross-modal transformer, end-to-end fine-tuning의 조합으로 높은 독창성과 실용성을 달성했다. 실제 로봇 검증과 명확한 기술 기여가 돋보이는 우수한 연구이다.