Essence
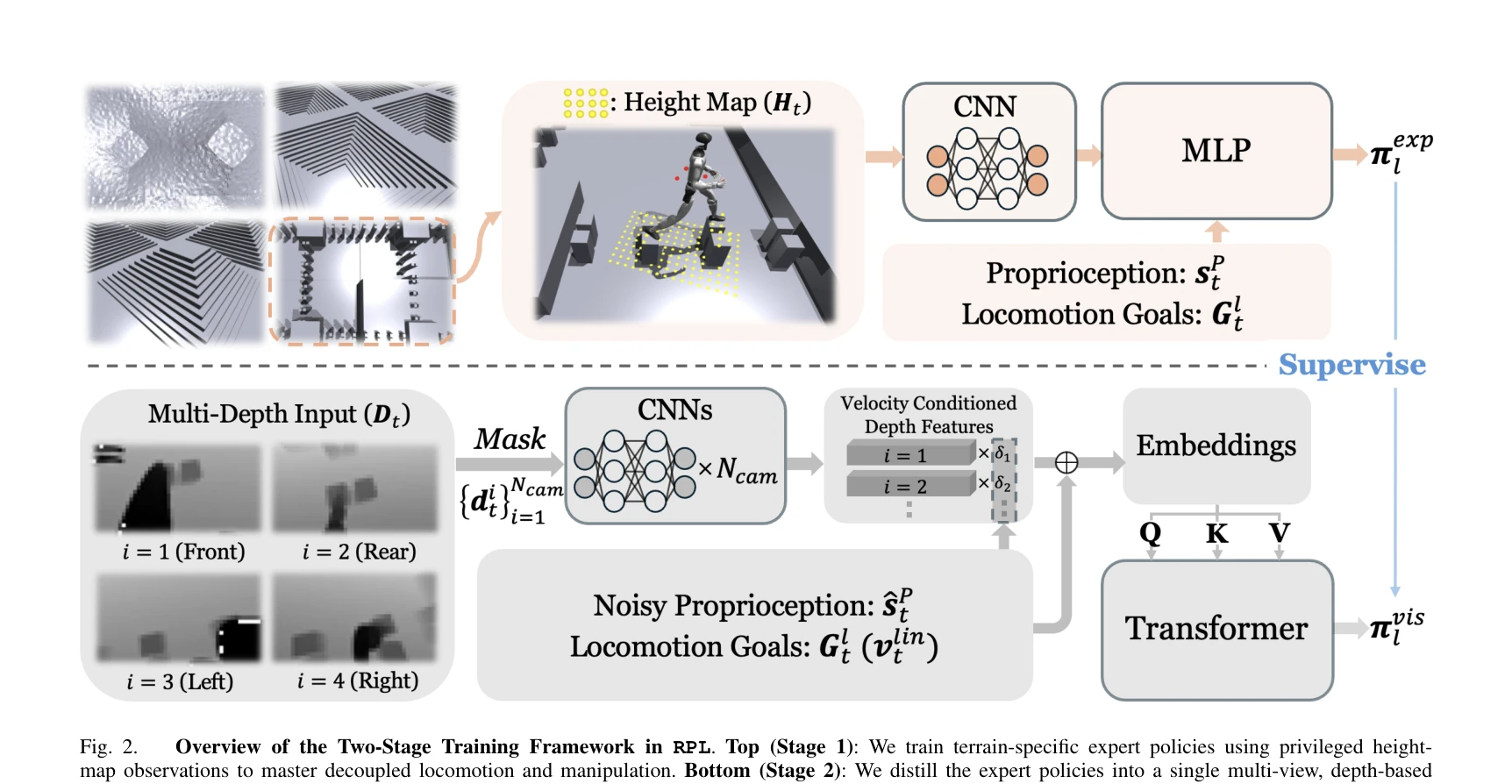
Fig. 2.
RPL은 두 단계 학습 프레임워크로 terrain-specific 전문가 정책을 depth 카메라 기반 transformer 정책으로 증류하여, 복잡한 지형에서 payload를 탑재한 상태의 견고한 다방향 인형로봇 보행을 실현한다.
저자: Yuanhang Zhang, Younggyo Seo, Juyue Chen, Yifu Yuan, Koushil Sreenath, Pieter Abbeel, Carmelo Sferrazza, Karen Liu, Rocky Duan, Guanya Shi | 날짜: 2026-02-03 | URL: https://arxiv.org/abs/2602.03002 📄 PDF
Fig. 2.
RPL은 두 단계 학습 프레임워크로 terrain-specific 전문가 정책을 depth 카메라 기반 transformer 정책으로 증류하여, 복잡한 지형에서 payload를 탑재한 상태의 견고한 다방향 인형로봇 보행을 실현한다.
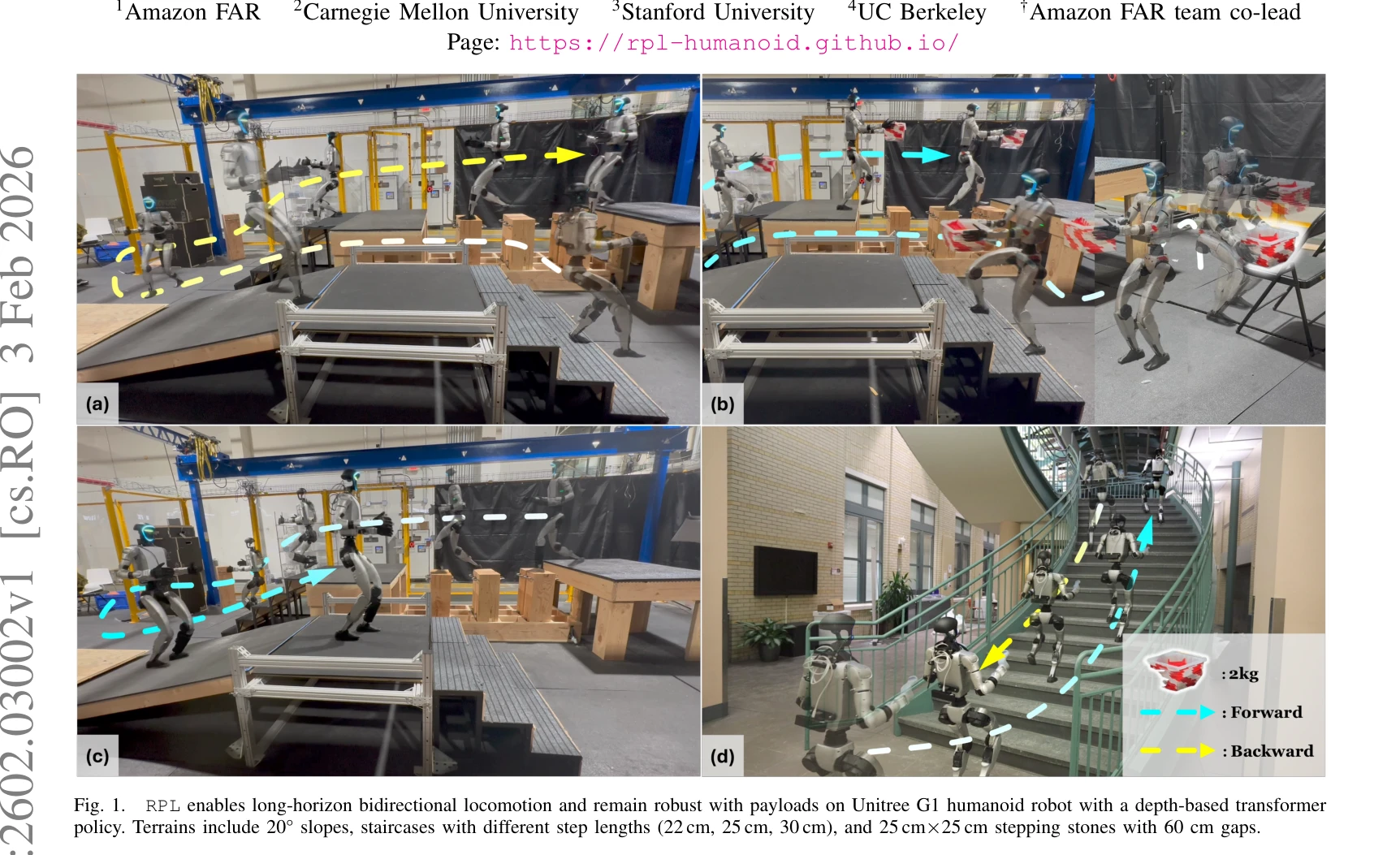
Fig. 1.
Fig. 2.
총평: 본 논문은 다단계 학습과 효율적 시뮬레이션을 통해 인형로봇의 복잡 지형 다방향 보행 문제를 체계적으로 해결하며, 특히 비대칭 다중 센서 입력 처리 기법과 payload 견고성 검증에서 실질적 기여를 제시한다.