저자: Qingwei Ben, Botian Xu, Kailin Li, Feiyu Jia, Wentao Zhang, Jingping Wang, Jingbo Wang, Dahua Lin, Jiangmiao Pang | 날짜: 2025-11-18 | URL: https://arxiv.org/abs/2511.14625 📄 PDF
Essence
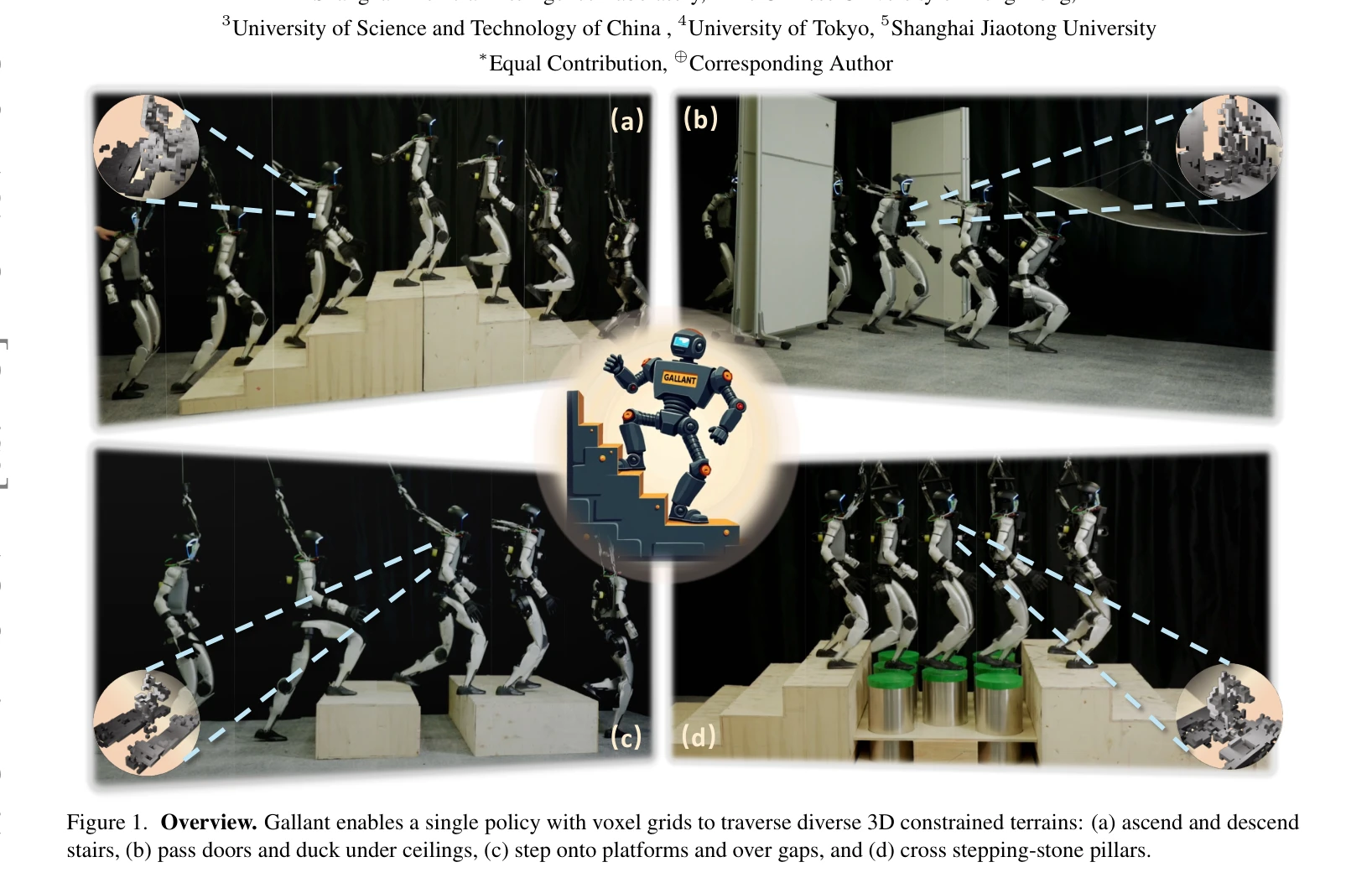
Figure 1. Overview. Gallant enables a single policy with voxel grids to traverse diverse 3D constrained terrains: (a) as
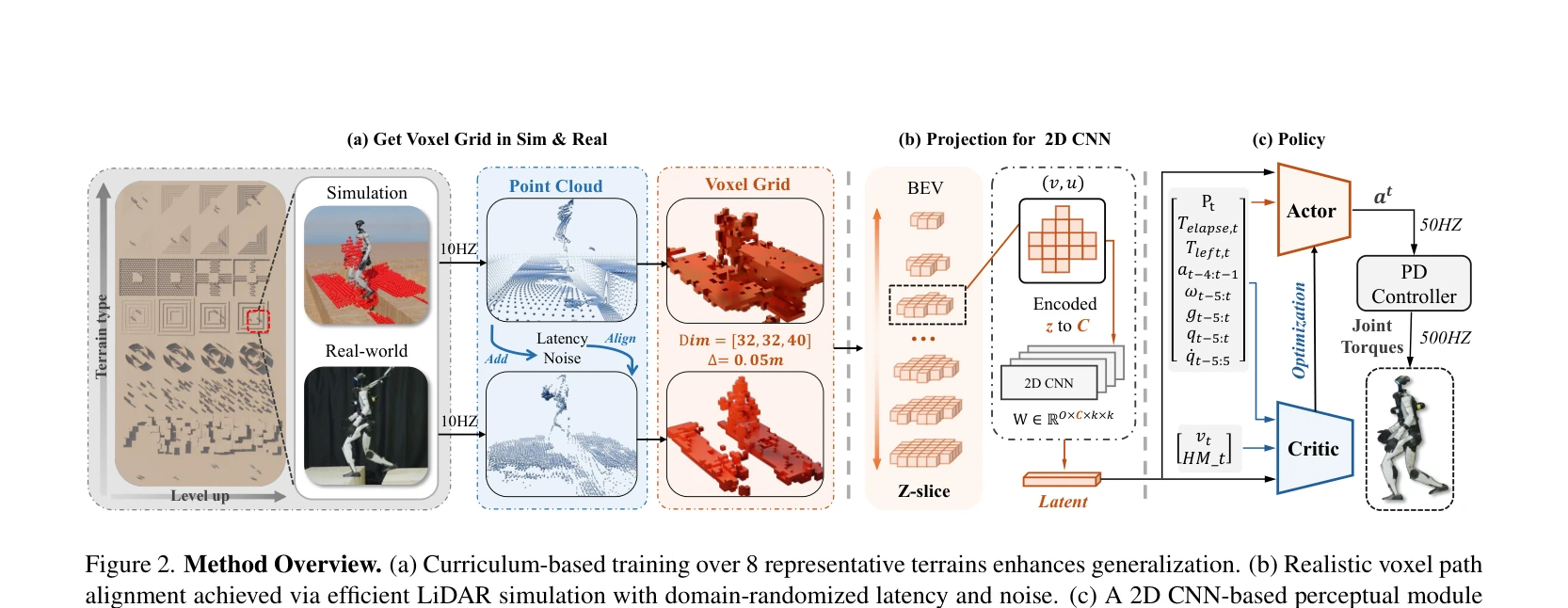
Gallant는 Voxel Grid 기반의 LiDAR 인식과 z-grouped 2D CNN을 활용하여 인간형 로봇이 계단, 천장, 측면 장애물 등 3D 제약 지형을 단일 정책으로 횡단할 수 있게 하는 프레임워크이다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: Gallant는 Voxel Grid와 효율적 CNN을 결합하여 인간형 로봇의 3D 지형 인식 문제를 체계적으로 해결하고, 고충실도 시뮬레이션과 end-to-end 최적화로 sim-to-real 일관성을 달성한 임팩트 있는 연구이다. 다만 실시간 성능과 지형 일반화의 추가 검증이 필요하다.